


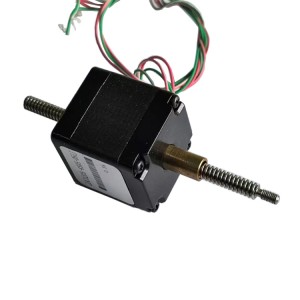
Motor gradualis hybridus linearis NEMA8 20mm cum axe cochleae principalis percurrente
Descriptio
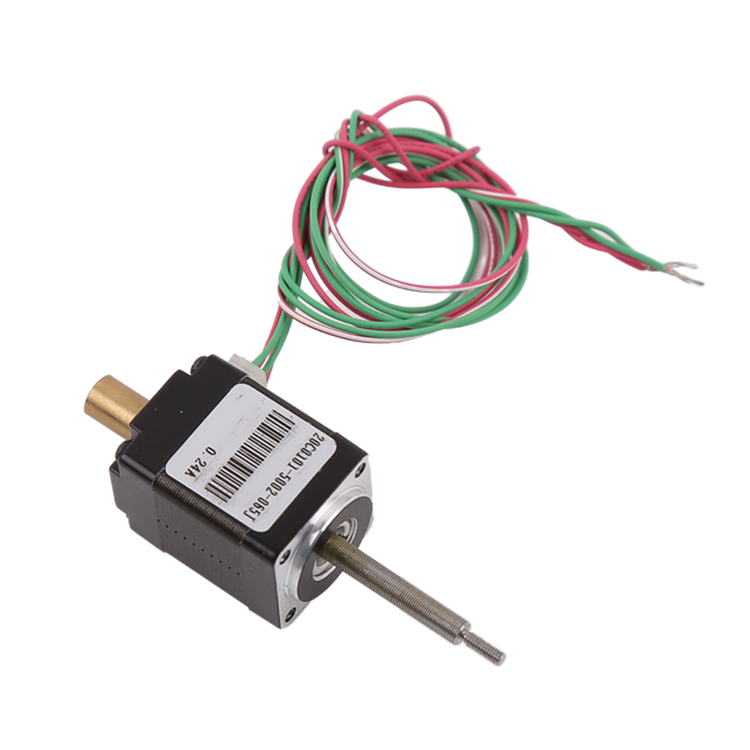
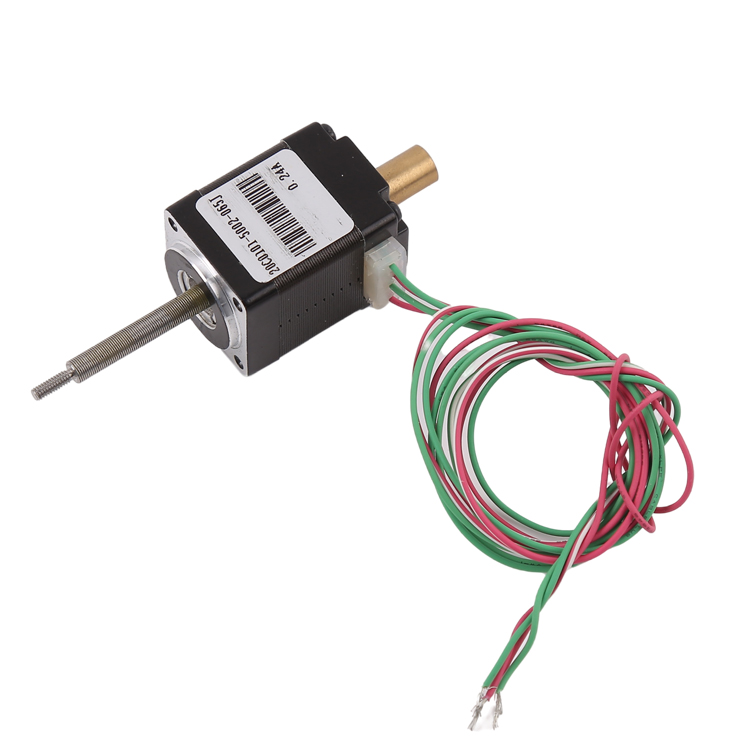
Hic est motor gradatim hybridus NEMA8 (magnitudine 20mm) cum axe percurso, qui etiam axis non captivus appellatur.
Non sicut motor gradualis cum axe rotundo/axe D, hic axis pertransiens libere sursum deorsumque moveri potest dum simul rotatur.
Hoc motor gradualis linearis appellatur, qui motum linearem facere potest.
Celeritas motus linearis a frequentia impulsoria et longitudine cochleae principalis determinatur.
Nux manualis in tergo motoris est, qua motorem manu rotare potest cum potentia extincta est, vel cum encoderibus coniungi potest ad systema circuli clausi.

Parametri
| Numerus exemplaris | 20C0101 |
| Diameter motoris | 20mm (NEMA8) |
| Tensio impulsoria | 5V DC |
| Resistentia spiralis | 20.8Ω ± 10%/phase |
| Numerus phasium | Duae phases |
| Angulus gradus | 1.8°/gradus |
| Currentis celeritatis | 0.24A/phase |
| Impulsus minimus (300PPS) | 2.4 kg |
| Longitudo gradus | 0.0015mm/gradus |
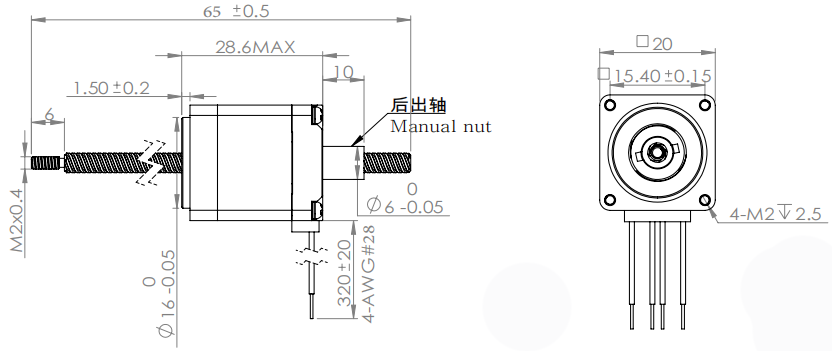
Delineatio Designationis
De cochlea plumbea
Cochlea principalis in motoribus gradatim hybridis linearibus adhibita plerumque cochlea principalis trapezoidali est.
Exempli gratia pro cochlea plumbea Tr3.5*P0.3*1N.
Tr significat cochleam trapezoidalem
P0.3 significat spatium cochleae principalis esse 0.3mm
1N significat cochleam plumbeam unius initii esse.
Cochlea principalis ductio = numerus initialis * passus
Ergo pro hac cochlea plumbea specifica, plumbum 0.3mm est.
Angulus gradualis motoris hybridi est 1.8 gradus/gradus, qui 200 gradus ad unam conversionem requirit.
Longitudo passus est motus linearis quem motor facit, cum unum gradum facit.
Cochleae principalis 0.3mm, longitudo gradus est 0.3mm/200 gradus = 0.0015mm/gradus.
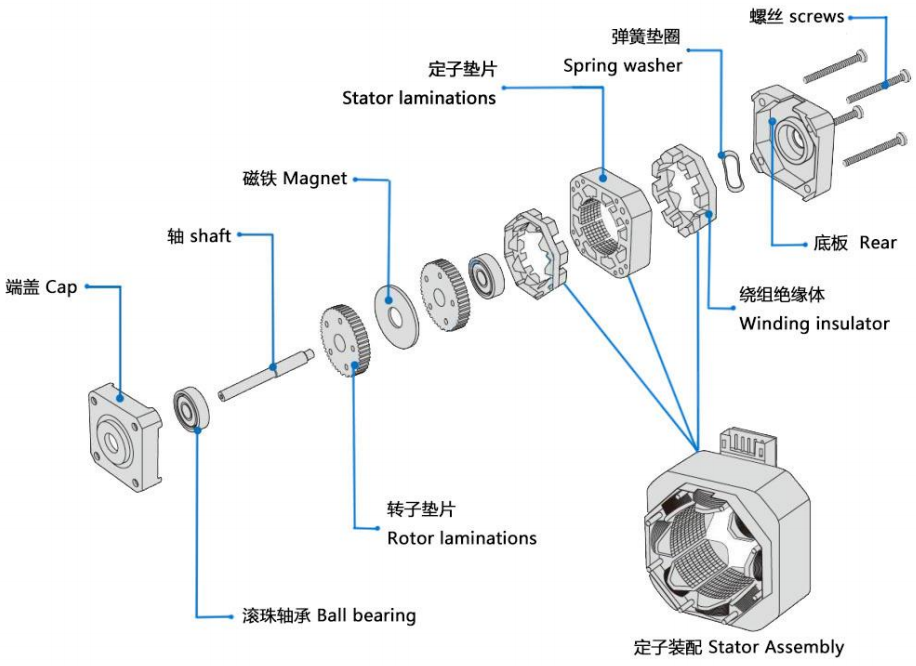
Structura fundamentalis motorum gradualium NEMA
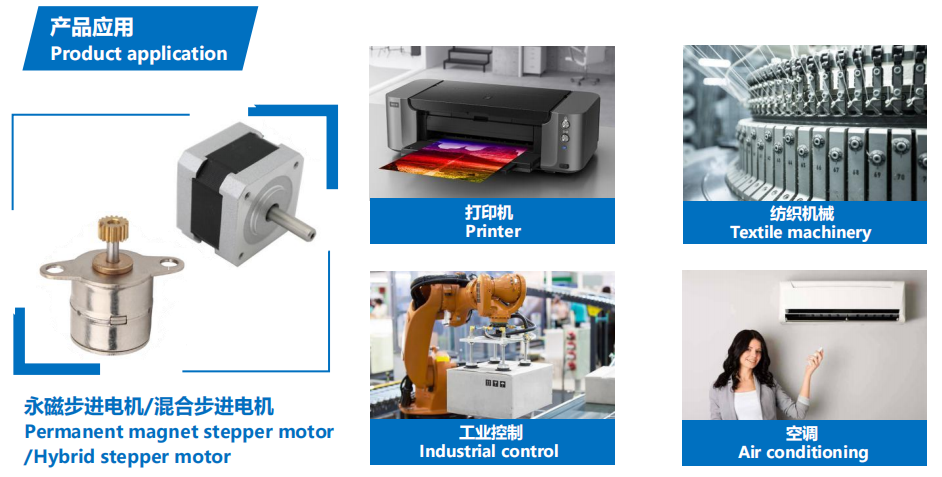
Applicatio motoris gradatorii hybridi
Propter altam resolutionem motorum gradatarium hybridorum (200 vel 400 gradus per revolutionem), late adhibentur ad applicationes quae magnam praecisionem requirunt, ut puta:
Impressio tridimensionalis
Moderatio industrialis (CNC, machina automatica fresatoria, machina textilis)
Peripherica computatralia
Machina sarcinandi
Et alia systemata automatica quae moderationem magnae praecisionis requirunt.
Emptores principium "primum motores graduales eligendi, deinde rectorem secundum motorem gradualem existentem eligere" sequi debent.
Optimum est modum agendi pleno-gradu non adhibere ad motorem gradatim hybridum agendum, et vibratio maior est sub agendo pleno-gradu.
Motor gradatim hybridus aptior est ad usus celeritatis lentae. Suademus ut celeritas non excedat 1000 rpm (6666 PPS ad 0.9 gradus), sed potius inter 1000-3000 PPS (0.9 gradus), et cum capsa rotarum coniungi potest ad celeritatem minuendam. Motor magnam efficaciam operandi et sonitum humilem ad frequentiam idoneam habet.
Ob causas historicas, solus motor cum tensione nominali 12V 12V utitur. Alia tensio nominalis in delineatione designationis non est aptissima tensio impulsiva pro motore. Clientes tensionem impulsivam idoneam et moderatorem idoneum secundum necessitates suas eligere debent.
Cum motor magna celeritate vel magno onere adhibetur, plerumque non directe celeritate laboris incipit. Suademus ut frequentiam et celeritatem gradatim augeas. Duabus de causis: Primo, motor gradus non amittit, secundo, sonitum minuere et accuratiam positionis augere potest.
Motor in regione vibrationis (infra 600 PPS) non debet operari. Si lente adhibendus est, problema vibrationis reduci potest mutando tensionem, currentem vel addendo quodam attenuatorem.
Cum motor infra 600PPS (0.9 gradus) operatur, parva currentia, magna inductantia et humili tensione agi debet.
Pro oneribus cum magno momento inertiae, motor magnae magnitudinis eligendus est.
Cum maior praecisio requiritur, id solvi potest addendo capsam dentatam, augendo celeritatem motoris, vel utendo subdivisione impulsionis. Etiam motor quinquephasis (motor unipolaris) adhiberi potest, sed pretium totius systematis relative carum est, itaque raro adhibetur.
Magnitudo motoris gradualis:
Motores gradatim hybridos 20mm (NEMA8), 28mm (NEMA11), 35mm (NEMA14), 42mm (NEMA17), 57mm (NEMA23), 86mm (NEMA34) nunc habemus. Cum motorem gradatim hybridum eligis, suademus ut magnitudinem motoris primum determines, deinde alium parametrum confirmes.
Servitium customizationis
Designatio motoris secundum requisita emptoris aptari potest, inter quae:
Diameter motoris: motores diametro 6mm, 8mm, 10mm, 15mm et 20 mm habemus.
Resistentia spiralis / tensio nominalis: resistentia spiralis est adaptabilis, et cum resistentia altiore, tensio nominalis motoris altior est.
Designatio fulcri/longitudo cochleae principalis: si emptor fulcrum longiorem/brevem esse vult, cum designatione speciali ut foraminibus adfixionis, adaptari potest.
PCB + funes + connector: Designatio PCB, longitudo funis et spatium connector omnia adaptari possunt, et in FPC si clientes requirunt, substitui possunt.
Tempus Ducendi
Si exempla in promptu habemus, intra tres dies exempla mittere possumus.
Si exempla in promptu non habemus, ea producere debemus, tempus productionis est circiter viginti dies calendarii.
Pro productione magna, tempus ductionis a quantitate ordinis pendet.
Modus et condiciones solutionis
Pro exemplis, plerumque Paypal vel Alibaba accipimus.
Pro productione magna, solutionem T/T accipimus.
Pro exemplaribus, solutionem plenam ante productionem colligimus.
Pro productione magna, 50% praesolutionis ante productionem accipere possumus, et reliquam 50% solutionis ante vecturam colligere.
Postquam plus quam sexies ordine cooperamur, alias condiciones solutionis, ut A/S (post visum), pacisci possumus.
Quaestiones Frequentes
1. Quantum temporis est generale tempus traditionis exemplorum? Quantum temporis est tempus traditionis pro magnis mandatis posterioribus?
Tempus executionis exemplaris est circiter XV dies, tempus executionis quantitatis magnae est XXV-XXX dies.
2. Accipitisne officia consuetudinaria?
Producta ad personam aptata accipimus, inter quae parametrum motoris, genus fili plumbei, axem externum, etc.
3. Estne possibile huic motori encoder addere?
Pro hoc genere motoris, encoder in operculo detritionis motoris addere possumus.
Mitte nobis nuntium tuum:
Categoriae productorum
-
Motor gradualis hybridus linearis NEMA11 28mm sine condensatore...
-

Motor gradualis hybridus linearis NEMA34 86mm externus...
-

NEMA 6 altae praecisionis biphasis quattuor filorum 14mm hybrida...
-

Motor gradualis NEMA 17 hybridus 42mm altae praecisionis...
-

Motor gradatarius hybridus NEMA11 magnitudinis 28mm 1.8 graduum...
-

Motor gradatorium hybridus NEMA 23 magni momenti, 57mm...