.jpg)
.jpg)
.jpg)
.jpg)
Motor gradatim hybridus Nema 11 (28mm), bipolaris, 4-philips, cochlea ACME, strepitu parvo, diuturna, alta efficacia.
Motor gradatim hybridus Nema 11 (28mm), bipolaris, 4-philips, cochlea ACME, strepitu parvo, diuturna, alta efficacia.
Hic motor gradatim hybridus 28mm tribus generibus praesto est: extrinsecus impulsus, per axem, et per axem fixum. Eligere potes secundum necessitates tuas specificas.
Impulsus maximus usque ad 240kg, augmentum temperaturae humile, vibratio humilis, strepitus humilis, vita longa (usque ad 5 miliones cyclorum), et accuratio positionis alta (usque ad ±0.01 mm).
Delineatio linearis motoris externi normae VSM28HSM:
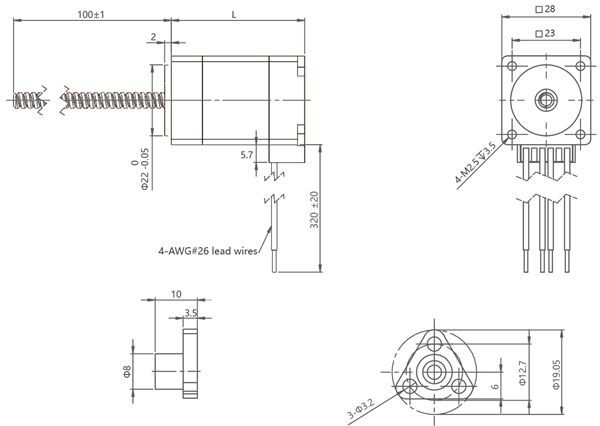
Notae:
Longitudo cochleae principalis adaptari potest
Machinatio ad mensuram aptata ad finem cochleae principalis utilis est.
Descriptiones
| Nomen Producti | Motores gradatim hybridi 20mm externe impulsi |
| Modellum | VSM20HSM |
| Typus | motores gradatim hybridi |
| Angulus Gradus | 1.8° |
| Tensio (V) | 2.5 / 6.3 |
| Currens (A) | 0.5 |
| Resistentia (Ohmia) | 5.1 / 12.5 |
| Inductantia (mH) | 1.5 / 4.5 |
| Fila plumbea | 4 |
| Momentum Tenendi (Nm) | 0.02 / 0.04 |
| Longitudo Motoris (mm) | XXX / XLII |
| Temperatura Ambientis | -20℃ ~ +50℃ |
| Incrementum Temperaturae | Maximus 80K. |
| Robur Dielectricum | 1mA Maximus @ 500V, 1KHz, 1Sec. |
| Resistentia Insulationis | 100MΩ Minimum @500Vdc |
Certificationes

Parametri Electrici:
| Magnitudo Motoris | Tensio/ Phase (V) | Praesens/ Phase (A) | Resistentia/ Phase (Ω) | Inductantia/ Phase (mH) | Numerus Fila plumbea | Inertia Rotoris (g.cm2) | Momentum Tenens (Nm) | Longitudo Motoris L (mm) |
| 20 | 2.5 | 0.5 | 5.1 | 1.5 | 4 | 2 | 0.02 | 30 |
| 20 | 6.3 | 0.5 | 12.5 | 4.5 | 4 | 3 | 0.04 | 42 |
Parametri technici generales:
| Spatium radiale | 0.02mm Maximum (onus 450g) | Resistentia insulationis | 100MΩ @ 500VDC |
| Spatium axiale | 0.08mm Maximum (onus 450g) | Robur dielectricum | 500V AC, 1mA, 1s@1KHz |
| Onus radiale maximum | 15N (20mm a superficie flangis) | Classis insulationis | Classis B (80K) |
| Onus axiale maximum | 5N | Temperatura ambientis | -20℃ ~ +50℃ |
Specificationes cochlearum:
| Diameter cochleae plumbeae (mm) | Plumbum (mm) | Gradus (mm) | Vis auto-clausura exstinguendi (N) |
| 3.5 | 0.6096 | 0.003048 | 80 |
| 3.5 | 1 | 0.005 | 40 |
| 3.5 | 2 | 0.01 | 10 |
| 3.5 | 4 | 0.02 | 1 |
| 3.5 | 8 | 0.04 | 0 |
Curva torsionis-frequentiae
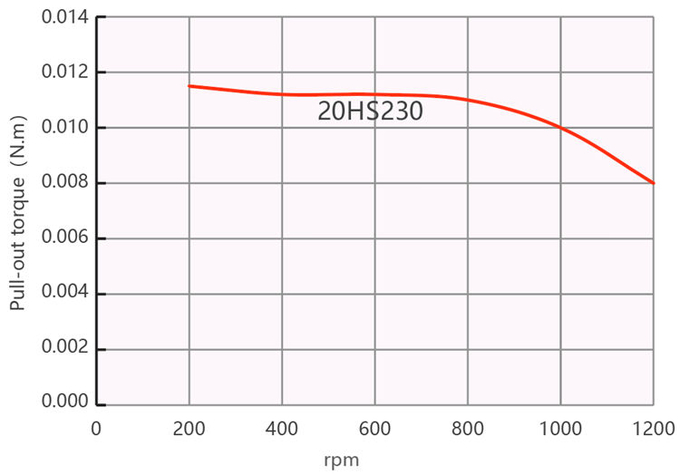
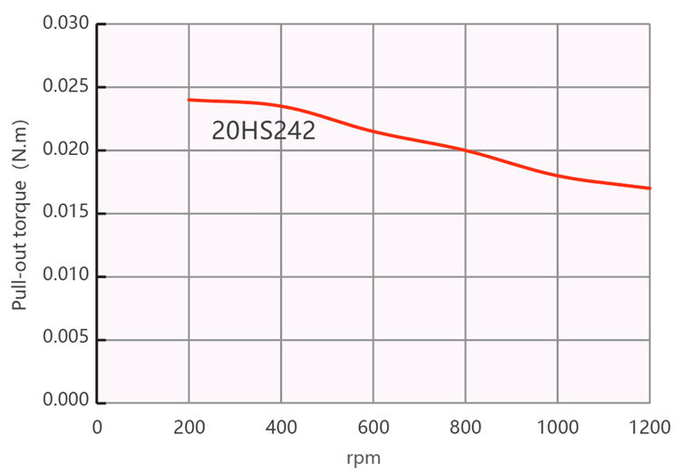
Conditio probationis:
Impulsus concisoris, dimidio microgradu, tensio impulsoris 24V
Areae applicationis
Impressio Tridimensionalis:Motores gradatim hybridi 20mm ad motus moderandos in impressoribus tridimensionalibus adhiberi possunt, ut caput impressionis, scaenam, et systema motus axialis impellant.
Instrumenta automataria: Hi motores graduales vulgo in instrumentis automatariis, ut machinis automaticis involucri, lineis automaticis compositionis, bracchiis roboticis automatice tractandis, etc., ad positionem et celeritatem accurate moderandam adhibentur.
Robotica:In agro roboticae, motores gradatim hybridi 20 mm ad motus articulationum robotarum moderandos adhibentur, ut status et situs accurate moderentur.
Machinae CNC:Hi motores graduales etiam in machinis instrumentis CNC adhibentur ad motus accuratos instrumentorum vel mensarum ad machinationem altae praecisionis impellendos.
Instrumenta medica:In apparatu medico, motores gradatim hybridi 20mm adhiberi possunt ad motum partium in apparatu medico, ut robotis chirurgicis et systematibus administrationis medicamentorum, accurate moderandum.
Instrumenta autocinetica:In industria autocinetica, hi motores gradatim moventes adhiberi possunt ad positionem et motum partium autocineticarum, ut systemata fenestrarum sublevandi et demittendi, systemata sedilium aptandi, et cetera, moderandas.
Domus Intelligentis:In agro domus intelligentis, motores gradatim hybridi 20mm ad aperitionem et clausuram cortinarum, rotationem camerarum in systematibus securitatis domesticae, et cetera moderandam adhiberi possunt.
Hae sunt nonnullae tantum ex communibus applicationibus motorum gradatarium hybridorum 20mm; re vera, motores gradatarii amplam applicationum varietatem in variis industriis et campis habent. Usus specifici etiam a specificationibus, effectu et requisitis moderationis propriis pendent.
Commodum
Accuratio et Facultas Positionis:Motores gradatim hybridi magnam praecisionem et facultatem positionis ad motus gradatim subtiles offerunt, saepe cum angulis gradatim humilibus, ut 1.8 graduum vel 0.9 graduum, quod efficit ut positionis moderatio accuratior fiat.
Magnum momentum torquens et magna celeritas:Motores gradatim hybridi structuraliter designati sunt ut magnum momentum rotatorium et, cum rectore et moderatore idoneis, celeritatem magnam praebeant. Hoc eos aptos reddit ad applicationes quae et magnum momentum rotatorium et motum celerem requirunt.
Moderatio et Programmatio:Motores gradatim hybridi sunt systema gubernationis circuitus aperti cum bona gubernabilitate. A regulatore accurate regi possunt in singulis gradibus motus, unde motus series valde programmabiles et gubernabiles eveniunt.
Simplex Impulsus et Imperium:Motores gradatim hybridi circuitus impulsoris et moderandi satis simplices habent, si cum aliis motoribus sint. Usum instrumentorum ad positionem respondendam (exempli gratia, codificatorum) non requirunt et directe a rectoribus et moderatoribus idoneis regi possunt. Hoc designum et institutionem systematis simplificat et sumptus minuit.
Alta fides et stabilitas:Motores gradatim hybridi propter constructionem simplicem, numerum parvum partium mobilium et designum sine spazzolis magnam firmitatem et stabilitatem offerunt. Curam regularem non requirunt, longam vitam utilem habent, et functionem stabilem cum usu et operatione recta praebent.
Efficax energiae et sonitus humilis:Motores gradatim hybridi efficaces sunt in energia, magnum momentum output praebentes potentia relative parva. Praeterea, plerumque operantur ut gradus sonitus inferiores producant, eis commodum praebentes in applicationibus sonitus sensitivis.
Requisita Selectionis Motoris:
►Directio motus/impositio
►Requisita Oneris
►Requisita Ictus
►Requisita machinationis finalis
►Requisita Praecisionis
►Requisita Responsionis Encoderis
►Requisita Adaptationis Manualis
►Requisita Ambientalia
Officina productionis



-300x300.jpg)
-300x300.jpg)
-300x300.jpg)
-300x300.jpg)
-300x300.jpg)