.jpg)
.jpg)
.jpg)
.jpg)
Motor gradatim hybridus Nema 17 (42mm), bipolaris, 4-phialis, cochlea ACME, angulus gradatim 1.8°, diuturnus, altae efficaciae.
Motor gradatim hybridus Nema 17 (42mm), bipolaris, 4-phialis, cochlea ACME, angulus gradatim 1.8°, diuturnus, altae efficaciae.
Hic motor gradatim hybridus 42mm tribus generibus praesto est: extrinsecus impulsus, per axem, et per axem fixum. Eligere potes secundum necessitates tuas specificas.
Descriptiones
| Nomen Producti | Motores gradatim hybridi 42mm |
| Modellum | VSM42HSM |
| Typus | motores gradatim hybridi |
| Angulus Gradus | 1.8° |
| Tensio (V) | 2/2.6/3.3 |
| Currens (A) | 1.5/2.5 |
| Resistentia (Ohmia) | 0.8/1.8/2.2 |
| Inductantia (mH) | 1.8/2.8/4.6 |
| Fila plumbea | 4 |
| Longitudo Motoris (mm) | XXXIV/XLVIII/XLVI |
| Temperatura Ambientis | -20℃ ~ +50℃ |
| Incrementum Temperaturae | Maximus 80K. |
| Robur Dielectricum | 1mA Maximus @ 500V, 1KHz, 1Sec. |
| Resistentia Insulationis | 100MΩ Minimum @500Vdc |
Certificationes

Parametri Electrici:
| Magnitudo Motoris | Tensio electrica /Phase (V) | Currens /Phase (A) | Resistentia /Phase (Ω) | Inductantia /Phase (mH) | Numerus Fila plumbea | Inertia Rotoris (g.cm2) | Pondus Motoris (g) | Longitudo Motoris L (mm) |
| 42 | 2.6 | 1.5 | 1.8 | 2.6 | 4 | 35 | 250 | 34 |
| 42 | 3.3 | 1.5 | 2.2 | 4.6 | 4 | 55 | 290 | 40 |
| 42 | 2 | 2.5 | 0.8 | 1.8 | 4 | 70 | 385 | 48 |
| 42 | 2.5 | 2.5 | 1 | 2.8 | 4 | 105 | 450 | 60 |
Specificationes cochleae principalis et parametri functionis
| Diameter (mm) | Plumbum (mm) | Gradus (mm) | Vim auto-clausuram exstinguere (N) |
| 6.35 | 1.27 | 0.00635 | CL |
| 6.35 | 3.175 | 0.015875 | 40 |
| 6.35 | 6.35 | 0.03175 | 15 |
| 6.35 | 12.7 | 0.0635 | 3 |
| 6.35 | 25.4 | 0.127 | 0 |
Nota: Pro pluribus specificationibus cochlearum ductibus, nobiscum quaeso contactum facias.
Delineatio linearis motoris externi normae VSM42HSM:
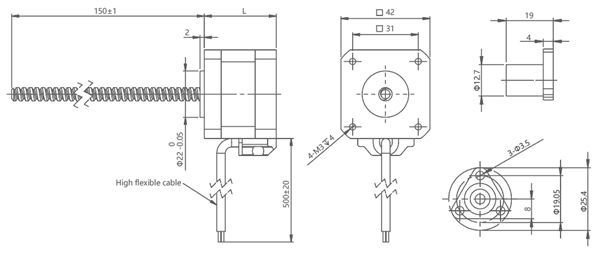
Notae:
Longitudo cochleae principalis adaptari potest
Machinatio ad mensuram aptata ad finem cochleae principalis utilis est.
Delineatio linearis motorum hybridorum gradatim 42mm, motoris captivi normae
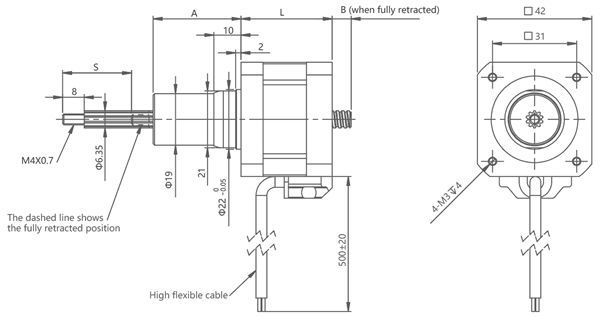
Notae:
Machinatio ad mensuram aptata ad finem cochleae principalis utilis est.
| Ictus S (mm) | Dimensio A (mm) | Dimensio B (mm) | |||
| L = 34 | L = 40 | L = 48 | L = LX | ||
| 12.7 | 20.6 | 6.4 | 0.4 | 0 | 0 |
| 19.1 | 27 | 12.8 | 6.8 | 0 | 0 |
| 25.4 | 33.3 | 19.1 | 13.1 | 5.1 | 0 |
| 31.8 | 39.7 | 25.5 | 19.5 | 11.5 | 0 |
| 38.1 | 46 | 31.8 | 25.8 | 17.8 | 5.8 |
| 50.8 | 58.7 | 44.5 | 38.5 | 30.5 | 18.5 |
| 63.5 | 71.4 | 57.2 | 51.2 | 43.2 | 31.2 |
Delineatio Lineamentae Motoris Hybridi Gradalis 42mm, Per Fixum Standard, Motoris
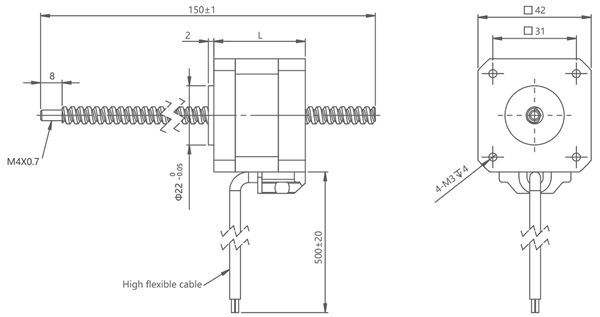
Notae:
Longitudo cochleae principalis adaptari potest
Machinatio ad mensuram aptata ad finem cochleae principalis utilis est.
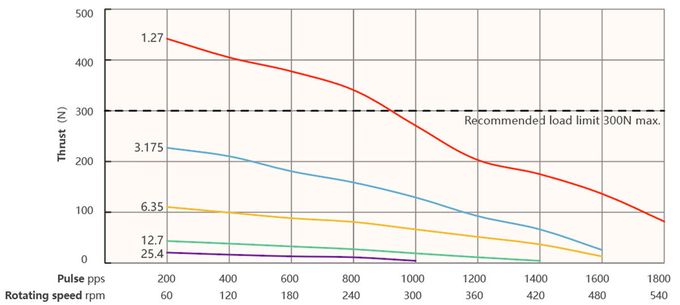
Curva celeritatis et impetus:
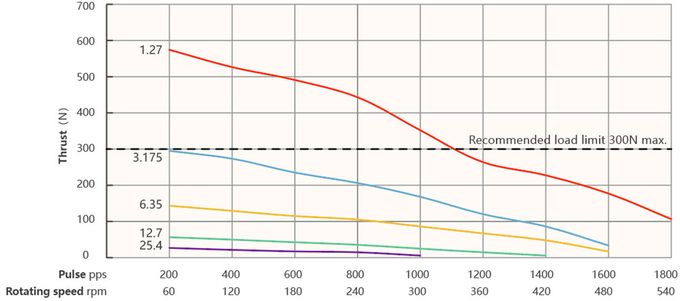
Motor bipolaris seriei 42, longitudinis 34mm, concissoris
Frequentia impulsuum et curva impulsionis 100% (cochlea principalis Φ6.35mm)
Series 42, motor bipolaris longitudinis 40mm, concissoris
Frequentia impulsuum et curva impulsionis 100% (cochlea principalis Φ6.35mm)
| Plumbum (mm) | Velocitas linearis (mm/s) | ||||||||
| 1.27 | 1.27 | 2.54 | 3.81 | 5.08 | 6.35 | 7.62 | 8.89 | 10.16 | 11.43 |
| 3.175 | 3.175 | 6.35 | 9.525 | 12.7 | 15.875 | 19.05 | 22.225 | 25.4 | 28.575 |
| 6.35 | 6.35 | 12.7 | 19.05 | 25.4 | 31.75 | 38.1 | 44.45 | 50.8 | 57.15 |
| 12.7 | 12.7 | 25.4 | 38.1 | 50.8 | 63.5 | 76.2 | 88.9 | 101.6 | 114.3 |
| 25.4 | 25.4 | 50.8 | 76.2 | 101.6 | 127 | 152.4 | 177.8 | 203.2 | 228.6 |
Conditio probationis:
Impulsus concisoris, sine ascensu, dimidio gradu micro, tensio impulsoris 40V
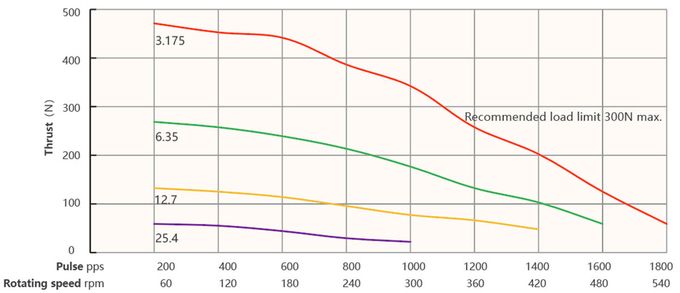
Motor seriei 42, longitudinis 48mm, bipolaris, concissoris impulsor
Frequentia impulsuum et curva impulsionis 100% (cochlea principalis Φ6.35mm)
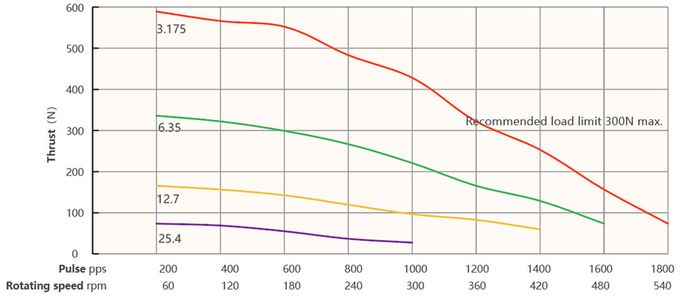
Motor bipolaris seriei 42, longitudinis 60mm, concissoris
Frequentia impulsuum et curva impulsionis 100% (cochlea principalis Φ6.35mm)
| Plumbum (mm) | Velocitas linearis (mm/s) | ||||||||
| 1.27 | 1.27 | 2.54 | 3.81 | 5.08 | 6.35 | 7.62 | 8.89 | 10.16 | 11.43 |
| 3.175 | 3.175 | 6.35 | 9.525 | 12.7 | 15.875 | 19.05 | 22.225 | 25.4 | 28.575 |
| 6.35 | 6.35 | 12.7 | 19.05 | 25.4 | 31.75 | 38.1 | 44.45 | 50.8 | 57.15 |
| 12.7 | 12.7 | 25.4 | 38.1 | 50.8 | 63.5 | 76.2 | 88.9 | 101.6 | 114.3 |
| 25.4 | 25.4 | 50.8 | 76.2 | 101.6 | 127 | 152.4 | 177.8 | 203.2 | 228.6 |
Conditio probationis:
Impulsus concisoris, sine ascensu, dimidio gradu micro, tensio impulsoris 40V
Areae applicationis
Instrumenta Automationis:Motores gradatim hybridi 42mm late in variis apparatibus automaticis adhibentur, inter quos sunt machinae automaticae involucri, lineae productionis automaticae, machinae instrumenta, et apparatus typographicus. Praebent accuratam positionis moderationem et magnum momentum rotatorium ut requisitis apparatuum automaticis pro motu praecisionis et fidelitate satisfaciant.
Impressores Tridimensionales:Motores gradatim hybridi 42mm partes magnas in impressoribus tridimensionalibus agunt. Ad caput impressoris movendum adhibentur, ut positionem altae praecisionis moderentur et operationes impressionis accuratas efficiant. Hi motores bonam accuratam positionis et firmitatem offerunt, quae adiuvant ad efficientiam et qualitatem impressionis impressorum tridimensionalium emendandam.
Instrumenta medica:Motores gradatim hybridi 42 mm late in instrumentis medicis adhibentur. Exempli gratia, in apparatu imaginum medicarum (e.g., tomographia computata, machinis radiographicis), hi motores ad moderandas tabulas rotantes et partes mobiles adhibentur. Praeterea, ad accuratam positionis moderationem in instrumentis medicis ut robotis chirurgicis, syringibus, et processu exemplarium automatico adhibentur.
Robotica:Motores gradatim hybridi 42 mm partes magnas in robotica agunt. Ad articulationes roboticas impellendas adhiberi possunt, positionem moderandam et momentum rotatorium praecisum praebentes. Inter applicationes roboticae sunt robota industrialia, robota ministerialia, et robota medica.
Autocinetica:Motores gradatim hybridi 42mm applicationes in apparatu autocinetico habent. In variis systematibus moderandi intra autocineta adhibentur, ut puta in adaptatione sedis autocineticae, elevatione et demissione fenestrarum, et adaptatione speculi retrovisoris. Hi motores moderationem positionis altae praecisionis et functionem certam praebent ut rectam operationem apparatuum autocineticorum curent.
Domus Intelligentis et Instrumenta Electronica Consumptiva:Motores gradatim hybridi 42mm in domibus callidis et electronicis domesticis adhibentur. In instrumentis ut serae ianuarum callidae, capita camerarum, cortinas callidas, purgatores roboticos, et cetera, adhiberi possunt ad positionem accuratam moderandam et functiones motus praebendas.
Praeter usus supra dictos, motores gradatim hybridi 42 mm etiam in apparatu textili, systematibus vigilantiae securitatis, moderatione illuminationis scaenicae, et aliis locis ubi accurata moderatio positionis et effectus fidus requiruntur, adhiberi possunt. In summa, motores gradatim hybridi 42 mm latam applicationum varietatem in multis industriis habent.
Commodum
Momentum torquens ad celeritates lentas:Motores gradatim hybridi 42mm praeclaram vim torquendi in celeritatibus parvis exhibent. Magnum momentum tenationis generare possunt, quo facto etiam in celeritatibus infimis leniter incipere et operari possunt. Haec proprietas eos aptos reddit ad usus qui accuratam gubernationem et motus tardos requirunt, ut robotica, apparatu automationis, et instrumentis medicis.
Accuratio Positionis:Hi motores magnam praecisionem positionis offerunt. Propter subtilem resolutionem graduum, positionem accuratam et motus accuratum moderamen consequi possunt. Hoc essentiale est in applicationibus quae positionem accuratam requirunt, ut machinis CNC, impressoribus 3D, et systematibus "pick-and-place".
Facultas Auto-Claudandi:Motores gradatim hybridi facultatem se auto-claudendi habent cum involucris non energiae adsunt. Hoc significat eos positionem suam sine energiae consumptione tenere posse, quod utile est in applicationibus ubi positionem sine energia tenere requiritur, ut in brachiis roboticis vel positionatoribus.
Efficax Impensarum:Motores gradatim hybridi 42mm solutionem pretio moderato multis applicationibus praebent. Comparati cum aliis generibus motorum, ut motoribus servo, plerumque viliores sunt. Praeterea, simplicitas systematis moderandi et absentia sensorum retroactionis ad eorum pretium moderatum conferunt.
Ampla Celeritatum Operativarum Varietas:Hi motores variis celeritatibus, a celeritatibus infimis ad celeritates relative altas, operari possunt. Bonam celeritatis moderationem offerunt et accelerationem et retardationem lenem consequi possunt. Haec flexibilitas in celeritatis moderatione eos aptos reddit ad applicationes cum variis celeritatis requisitis.
Magnitudo Compacta:Forma 42mm magnitudinem relative compactam motoris gradualis repraesentat. Hoc faciliorem reddit integrationem in applicationes spatio angusto vel apparatum qui designia compacta et levia requirunt.
Fiducia et Diuturnitas:Motores gradatim hybridi propter firmitatem et diuturnitatem noti sunt. Designati sunt ut continue per longas periodos operentur, cum minima necessitate sustentationis.
Requisita Selectionis Motoris:
►Directio motus/impositio
►Requisita Oneris
►Requisita Ictus
►Requisita machinationis finalis
►Requisita Praecisionis
►Requisita Responsionis Encoderis
►Requisita Adaptationis Manualis
►Requisita Ambientalia
Officina productionis


-300x300.jpg)
-300x300.jpg)
-300x300.jpg)
-300x300.jpg)
-300x300.jpg)