.jpg)
.jpg)
.jpg)
.jpg)
Motor gradatim hybridus Nema 23 (57mm), bipolaris, 4-phialis, cochlea ACME, strepitu parvo, diuturna, alta efficacia.
Motor gradatim hybridus Nema 23 (57mm), bipolaris, 4-phialis, cochlea ACME, strepitu parvo, diuturna, alta efficacia.
Hic motor gradatim hybridus 57mm tribus generibus praesto est: extrinsecus impulsus, per axem, et per axem fixum. Eligere potes secundum necessitates tuas specificas.
Hic motor praesto est magnitudinibus 20mm, 28mm, 35mm, 42mm, 57mm, 86mm.
Longitudo gradus, 0.001524mm ~ 0.127mm
Impulsus maximus usque ad 240kg, augmentum temperaturae humile, vibratio humilis, strepitus humilis, vita longa (usque ad 5 miliones cyclorum), accuratio positionis alta (usque ad ±0.01 mm)
Descriptiones
| Nomen Producti | Motores gradatim hybridi 57mm |
| Modellum | VSM57HSM |
| Typus | motores gradatim hybridi |
| Angulus Gradus | 1.8° |
| Tensio (V) | 2.3 / 3 / 3.1 / 3.8 |
| Currens (A) | Tres quartae partes |
| Resistentia (Ohmia) | 0.75 / 1 / 0.78 / 0.95 |
| Inductantia (mH) | 2.5 / 4.5 / 3.3 / 4.5 |
| Fila plumbea | 4 |
| Longitudo Motoris (mm) | 45 / 55 / 65 / 75 |
| Temperatura Ambientis | -20℃ ~ +50℃ |
| Incrementum Temperaturae | Maximus 80K. |
| Robur Dielectricum | 1mA Maximus @ 500V, 1KHz, 1Sec. |
| Resistentia Insulationis | 100MΩ Minimum @500Vdc |
Certificationes

Parametri Electrici:
| Magnitudo Motoris | Tensio electrica /Phase (V) | Currens /Phase (A) | Resistentia /Phase (Ω) | Inductantia /Phase (mH) | Numerus Fila plumbea | Inertia Rotoris (g.cm2) | Pondus Motoris (g) | Longitudo Motoris L (mm) |
| 57 | 2.3 | 3 | 0.75 | 2.5 | 4 | CL | 580 | 45 |
| 57 | 3 | 3 | 1 | 4.5 | 4 | trecenti | DCCX | 55 |
| 57 | 3.1 | 4 | 0.78 | 3.3 | 4 | quadringenti | DCCCLXXX | 65 |
| 57 | 3.8 | 4 | 0.95 | 4.5 | 4 | 480 | 950 | 75 |
Specificationes cochleae principalis et parametri functionis
| Diameter (mm) | Plumbum (mm) | Gradus (mm) | Vim auto-clausuram exstinguere (N) |
| 9.525 | 1.27 | 0.00635 | DCCC |
| 9.525 | 2.54 | 0.0127 | trecenti |
| 9.525 | 5.08 | 0.0254 | 90 |
| 9.525 | 10.16 | 0.0508 | 30 |
| 9.525 | 25.4 | 0.127 | 6 |
Nota: Pro pluribus specificationibus cochlearum ductibus, nobiscum quaeso contactum facias.
Delineatio linearis motoris externi normae VSM57HSM:
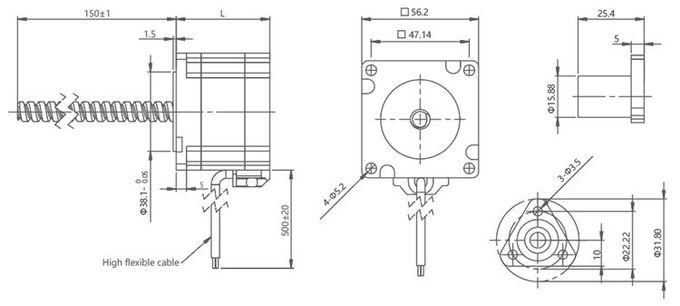
Notae:
Longitudo cochleae principalis adaptari potest
Machinatio ad mensuram aptata ad finem cochleae principalis utilis est.
Motores gradatim hybridi 57mm, delineatio schematis motoris captivi normae:
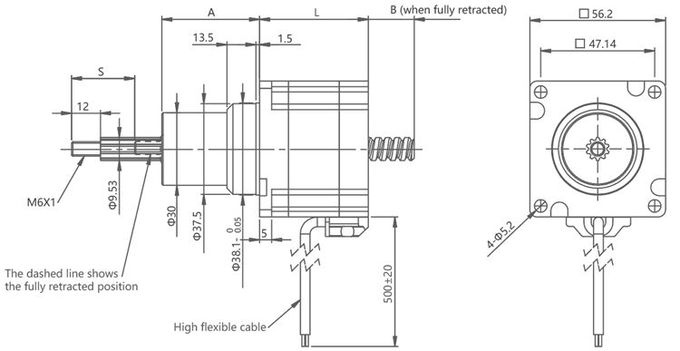
Notae:
Machinatio ad mensuram aptata ad finem cochleae principalis utilis est.
| Ictus S (mm) | Dimensio A (mm) | Dimensio B (mm) | |||
| L = 45 | L = 55 | L = 65 | L = 75 | ||
| 12.7 | 24.1 | 1.1 | 0 | 0 | 0 |
| 19.1 | 30.5 | 7.5 | 0 | 0 | 0 |
| 25.4 | 36.8 | 13.8 | 4.8 | 0 | 0 |
| 31.8 | 43.2 | 20.2 | 11.2 | 0.2 | 0 |
| 38.1 | 49.5 | 26.5 | 17.5 | 6.5 | 0 |
| 50.8 | 62.2 | 39.2 | 30.2 | 19.2 | 9.1 |
| 63.5 | 74.9 | 51.9 | 42.9 | 31.9 | 21.9 |
Delineatio Lineamentae Motoris Hybridi Gradalis 57mm, Per Fixum Standard, pro Motore
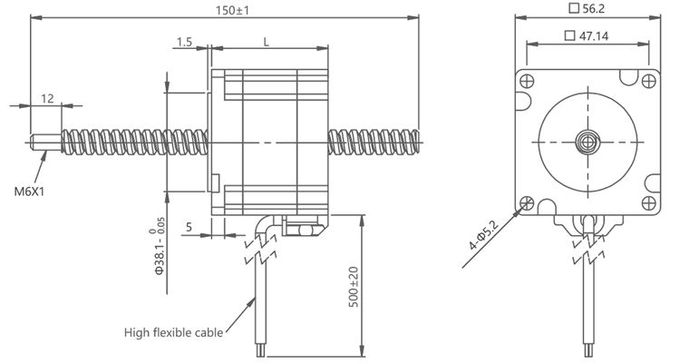
Notae:
Longitudo cochleae principalis adaptari potest
Machinatio ad mensuram aptata ad finem cochleae principalis utilis est.
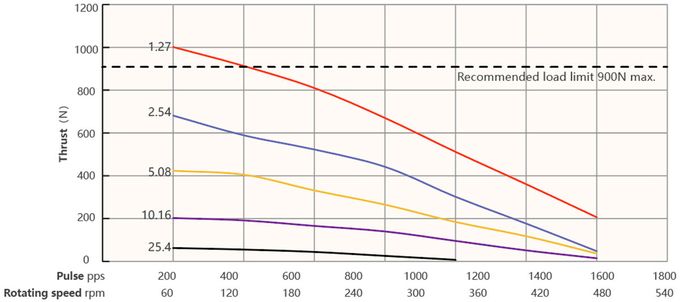
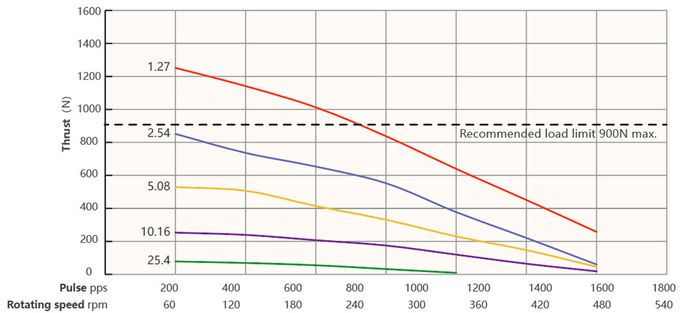
Curva celeritatis et impetus:
Motor seriei 57, longitudinis 45mm, bipolaris, concissoris impulsor.
Frequentia impulsuum et curva impulsionis 100% (cochlea principalis Φ9.525mm)
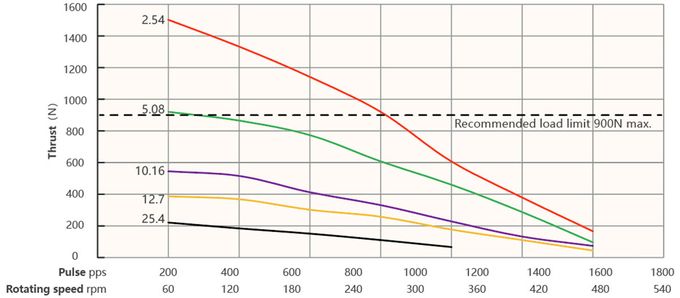
Motor seriei 57, longitudinis 55mm, bipolaris, concissoris impulsor
Frequentia impulsuum et curva impulsionis 100% (cochlea principalis Φ9.525mm)
| Plumbum (mm) | Velocitas linearis (mm/s) | ||||||||
| 1.27 | 1.27 | 2.54 | 3.81 | 5.08 | 6.35 | 7.62 | 8.89 | 10.16 | 11.43 |
| 2.54 | 2.54 | 5.08 | 7.62 | 10.16 | 12.7 | 15.24 | 17.78 | 20.32 | 22.86 |
| 5.08 | 5.08 | 10.16 | 15.24 | 20.32 | 25.4 | 30.48 | 35.56 | 40.64 | 45.72 |
| 10.16 | 10.16 | 20.32 | 30.48 | 40.64 | 50.8 | 60.96 | 71.12 | 81.28 | 91.44 |
| 25.4 | 25.4 | 50.8 | 76.2 | 101.6 | 127 | 152.4 | 711.8 | 203.2 | 228.6 |
Conditio probationis:
Impulsus concisoris, sine ascensu, dimidio gradu micro, tensio impulsoris 40V
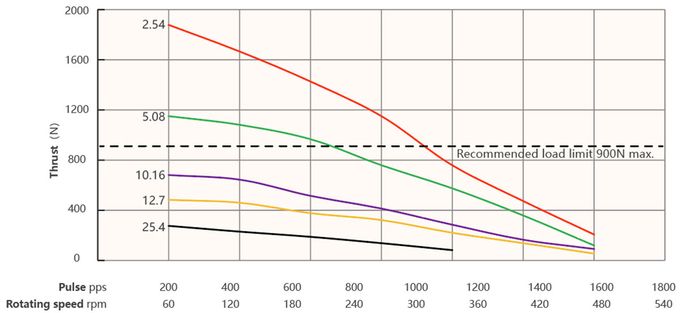
Motor seriei 57, longitudinis 65mm, bipolaris, concissoris impulsor
Frequentia impulsuum et curva impulsionis 100% (cochlea principalis Φ9.525mm)
Motor seriei 57, longitudinis 75mm, bipolaris, concissoris impulsor
Frequentia impulsuum et curva impulsionis 100% (cochlea principalis Φ9.525mm)
| Plumbum (mm) | Velocitas linearis (mm/s) | ||||||||
| 1.27 | 1.27 | 2.54 | 3.81 | 5.08 | 6.35 | 7.62 | 8.89 | 10.16 | 11.43 |
| 2.54 | 2.54 | 5.08 | 7.62 | 10.16 | 12.7 | 15.24 | 17.78 | 20.32 | 22.86 |
| 5.08 | 5.08 | 10.16 | 15.24 | 20.32 | 25.4 | 30.48 | 35.56 | 40.64 | 45.72 |
| 10.16 | 10.16 | 20.32 | 30.48 | 40.64 | 50.8 | 60.96 | 71.12 | 81.28 | 91.44 |
| 25.4 | 25.4 | 50.8 | 76.2 | 101.6 | 127 | 152.4 | 711.8 | 203.2 | 228.6 |
Conditio probationis:
Impulsus concisoris, sine ascensu, dimidio gradu micro, tensio impulsoris 40V
Areae applicationis
Impressio Tridimensionalis:Motores gradatim hybridi 57mm in impressoribus tridimensionalibus late adhibentur ad positionem et motum capitis impressoris moderandum.
Machinae CNC:In machinis instrumentis Moderationis Numericae Computatralis (CNC), motores gradatim hybridi 57mm adhibentur ad motum instrumentorum secantium regendum ad operationes machinationis accuratas.
Instrumenta automationis:Motores gradatim hybridi 57mm in variis apparatibus automationis, ut machinis automaticis involucri, systematibus automaticis separationis, lineis automaticis compositionis, etc., ad motum et positionem moderandam adhiberi possunt.
Machinae Textiles:In industria textili, motores gradatim hybridi 57mm ad machinas filatorias, telas, aliasque machinas regendas adhiberi possunt, ut accuratio et stabilitas processus textili praestetur.
Instrumenta medica:Motores gradatim hybridi 57mm late in apparatu medico, ut in antliis syringeticae medicae, robotis medicis, apparatu imaginum perscrutantium, etc., ad accuratam positionis gubernationem et motus gubernationem adhibentur.
Robotica:Motores gradatim hybridi 57mm in variis applicationibus roboticis, inter quas robota industrialia, robota servitialia, robota collaborativa, et cetera, ad motum et manipulationem accuratam adhibentur.
Systema Repositoria Automata:In systematibus automatis repositionis et logisticae, motores gradatim hybridi 57mm adhiberi possunt ad taenias transportatorias, elevatoria, grues stratificatrices et alia instrumenta regenda, ut accuratam rerum positionem et tractationem efficiant.
Hae sunt tantum nonnullae ex applicationibus typicis motorum gradatarium hybridorum 57mm, et re vera, late in multis aliis campis adhibentur, inter quos apparatus typographicus, systemata securitatis, instrumenta praecisionis, et cetera.
Commodum
Alta proportio momenti ad magnitudinem:Quamvis magnitudine compacta sint, motores gradatim hybridi 57mm magnum momentum rotatorium praebere possunt. Hoc eos aptos reddit ad usus ubi spatium limitatum est, sed magnum momentum rotatorium requiritur.
Imperium circuitus aperti:Motores gradatim hybridi in systemate moderationis circuitus aperti operari possunt, quod significat eos instrumenta positionis retroactionis, ut codificatores, non requirere. Hoc systema moderationis simplificat et sumptus generales minuit.
Positio accurata:Motores gradatim hybridi propter innatam resolutionem graduum praestant facultatem positionis accuratae. Movere possunt parvis incrementis, ita ut positionem accuratam et repetibilitatem permittant.
Operatio lenis:Motores gradatim hybridi operationem lenem consequi possunt, praesertim cum technicis microgradualibus aguntur. Microgradualitas quemque gradum in subgradus minores dividit, quod motum leniorem et vibrationem imminutam efficit.
Tempus responsionis celeris:Motores gradatim hybridi celeria tempora responsorum habent, accelerationem et retardationem celerem permittentes. Haec proprietas utilis est applicationibus motus dynamicos et agiles requirentibus.
Alta fides et firmitas:Motores gradatim hybridi propter robustatem et firmitatem noti sunt. Longam vitam operationis habent, parvam curam requirunt, et condiciones operationis difficiles tolerare possunt.
Solutio sumptibus parcis:Comparati cum aliis technologiis moderationis motus, ut motoribus servo, motores gradatim hybridi plerumque solutionem magis sumptuum offerunt. Bonum aequilibrium inter efficaciam et pretium moderatum praebent.
Facilis integratio:Motores gradatim hybridi late praesto sunt et cum variis electronicis impulsoriis et systematibus moderationis congruunt. Facile in varia genera machinarum et configurationum automationis integrari possunt.
Efficientia energiae:Motores gradatim hybridi vim consumunt tantum cum in motu sunt, quod eos efficaces energiae reddit. Cum stationarii sunt, vim continuam non requirunt, quod ad summam energiae conservationem conferunt.
Requisita Selectionis Motoris:
►Directio motus/impositio
►Requisita Oneris
►Requisita Ictus
►Requisita machinationis finalis
►Requisita Praecisionis
►Requisita Responsionis Encoderis
►Requisita Adaptationis Manualis
►Requisita Ambientalia
Officina productionis


-300x300.jpg)
-300x300.jpg)
-300x300.jpg)
-300x300.jpg)
-300x300.jpg)