.jpg)
.jpg)
.jpg)
.jpg)
Motor gradatim hybridus Nema 34 (86mm), bipolaris, 4-phibulae, cochlea ACME, strepitu parvo, diuturna, ad apparatum medicum destinatus.
Descriptio
Hic motor gradatim hybridus 86mm tribus generibus praesto est: extrinsecus impulsus, per axem, et per axem fixum. Eligere potes secundum necessitates tuas specificas.
Motor gradualis cochleae ACME motum rotatorium in motum linearem convertit, cochlea principali adhibita; cochlea principali varias combinationes diametri et axialis habet, ut variis requisitis applicationis satisfaciat.
Motor gradualis cochleae principalis typice adhibetur in applicationibus quae motum linearem accuratum, sonitum parvum, et sumptus efficaces requirunt, ut in apparatu medico, instrumento telecommunicationum, etc.
ThinkerMotion seriem plenam motorum gradualium cochlearum principalium (NEMA 8, NEMA11, NEMA14, NEMA17, NEMA23, NEMA24, NEMA34) offert, cum amplitudine oneris a 30N ad 2400N, et tres genera praesto sunt (externa, captiva, non-captiva). Adaptationes ad petitionem fieri possunt, ut longitudo cochleae et extremitas cochleae, frenum magneticum, codificator, nux anti-reflexionis, etc.; et cochlea principalis etiam Teflon obduci potest ad petitionem.

Descriptiones
| Nomen Producti | Motores gradatim hybridi 86mm |
| Modellum | VSM86HSM |
| Typus | motores gradatim hybridi |
| Angulus Gradus | 1.8° |
| Tensio (V) | 3/4.8 |
| Currens (A) | 6 |
| Resistentia (Ohmia) | 0.5/0.8 |
| Inductantia (mH) | 4/8.5 |
| Fila plumbea | 4 |
| Longitudo Motoris (mm) | 76/114 |
| Temperatura Ambientis | -20℃ ~ +50℃ |
| Incrementum Temperaturae | Maximus 80K. |
| Robur Dielectricum | 1mA Maximus @ 500V, 1KHz, 1Sec. |
| Resistentia Insulationis | 100MΩ Minimum @500Vdc |
Certificationes

Parametri Electrici:
| Magnitudo Motoris | Tensio electrica /Phase (V) | Currens /Phase (A) | Resistentia /Phase (Ω) | Inductantia /Phase (mH) | Numerus Fila plumbea | Inertia Rotoris (g.cm2) | Pondus Motoris (g) | Longitudo Motoris L (mm) |
| 86 | 3 | 6 | 0.5 | 4 | 4 | 1300 | 2400 | 76 |
| 86 | 4.8 | 6 | 0.8 | 8.5 | 4 | 2500 | Quinque milia | 114 |
Specificationes cochleae principalis et parametri functionis
| Diameter (mm) | Plumbum (mm) | Gradus (mm) | Vim auto-clausuram exstinguere (N) |
| 15.875 | 2.54 | 0.0127 | MM |
| 15.875 | 3.175 | 0.015875 | 1500 |
| 15.875 | 6.35 | 0.03175 | ducenti |
| 15.875 | 12.7 | 0.0635 | 50 |
| 15.875 | 25.4 | 0.127 | 20 |
Nota: Pro pluribus specificationibus cochlearum ductibus, nobiscum quaeso contactum facias.
Delineatio linearis motoris externi normae VSM86HSM
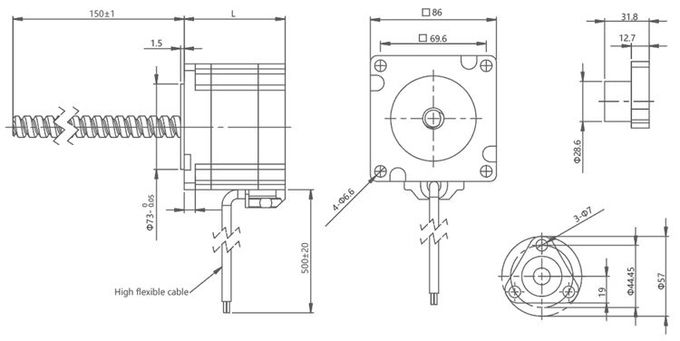
Notae:
Longitudo cochleae principalis adaptari potest
Machinatio ad mensuram aptata ad finem cochleae principalis utilis est.
Delineatio schematis motorum captivorum hybridorum 86mm, motorum gradatim hybridorum, normae:
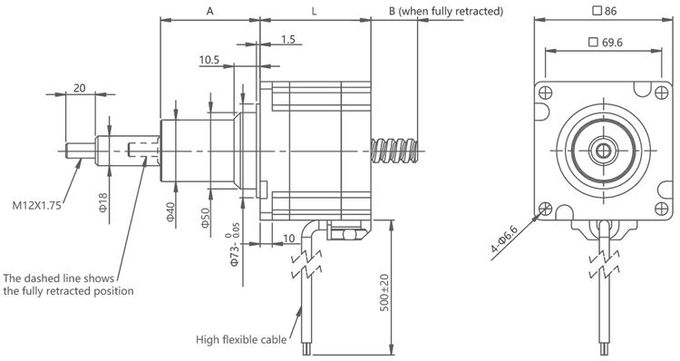
Notae:
Machinatio ad mensuram aptata ad finem cochleae principalis utilis est.
| Ictus S (mm) | Dimensio A (mm) | Dimensio B (mm) | |
| L = 76 | L = 114 | ||
| 12.7 | 29.7 | 0 | 0 |
| 19.1 | 36.1 | 2.1 | 0 |
| 25.4 | 42.4 | 8.4 | 0 |
| 31.8 | 48.8 | 14.8 | 0 |
| 38.1 | 55.1 | 21.1 | 0 |
| 50.8 | 67.8 | 33.8 | 0 |
| 63.5 | 80.5 | 46.5 | 8.5 |
Delineatio Lineamentalis Motoris Hybridi Gradalis 86mm, Per Fixum Standard, Motoris
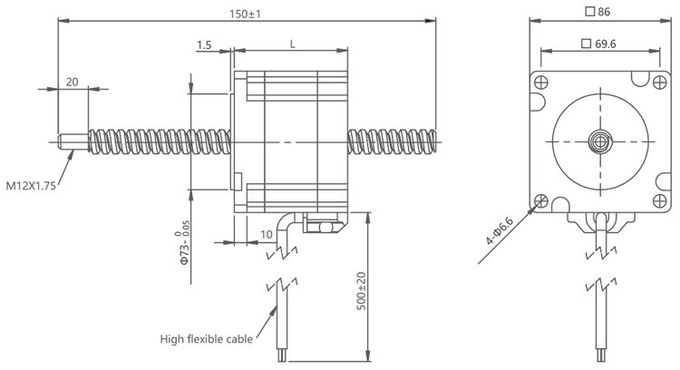
Notae:
Longitudo cochleae principalis adaptari potest
Machinatio ad mensuram aptata ad finem cochleae principalis utilis est.
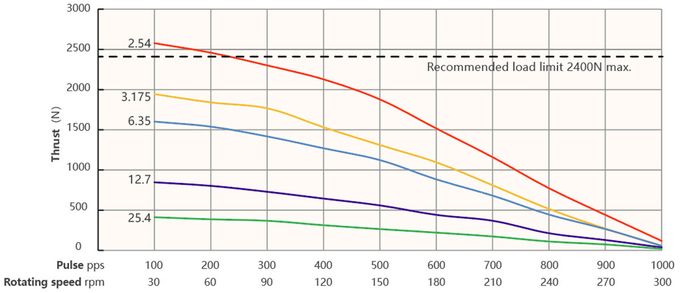
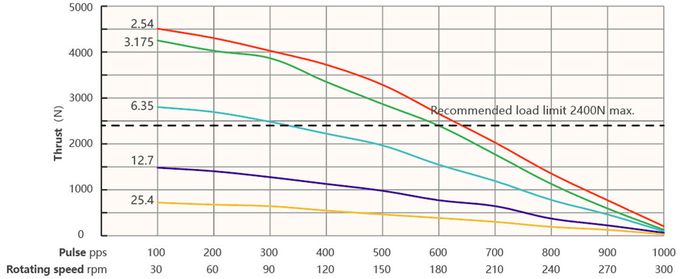
Curva celeritatis et impetus:
Motor seriei 86, longitudinis 76mm, bipolaris, concissoris impulsor
Frequentia impulsuum et curva impulsionis 100% (cochlea principalis Φ15.88mm)
Motor seriei 86, longitudine motoris 114mm, bipolaris, concissoris impulsor.
Frequentia impulsuum et curva impulsionis 100% (cochlea principalis Φ15.88mm)
| Plumbum (mm) | Velocitas linearis (mm/s) | |||||||||
| 2.54 | 1.27 | 2.54 | 3.81 | 5.08 | 6.35 | 7.62 | 8.89 | 10.16 | 11.43 | 12.7 |
| 3.175 | 1.5875 | 3.175 | 4.7625 | 6.35 | 7.9375 | 9.525 | 11.1125 | 12.7 | 14.2875 | 15.875 |
| 6.35 | 3.175 | 6.35 | 9.525 | 12.7 | 15.875 | 19.05 | 22.225 | 25.4 | 28.575 | 31.75 |
| 12.7 | 6.35 | 12.7 | 19.05 | 25.4 | 31.75 | 38.1 | 44.45 | 50.8 | 57.15 | 63.5 |
| 25.4 | 12.7 | 25.4 | 38.1 | 50.8 | 63.5 | 76.2 | 88.9 | 101.6 | 114.3 | 127 |
Conditio probationis:
Impulsus concisoris, sine ascensu, dimidio gradu micro, tensio impulsoris 40V
Areae applicationis
Machinae CNC:Motores gradatim hybridi 86mm late in machinis CNC adhibentur ad motum et positionem instrumentorum secantium moderandum, ut operationes machinationis altae praecisionis perficiantur.
Instrumenta automationis:Motores gradatim hybridi 86mm in variis apparatibus automationis, ut machinis automaticis involucri, systematibus automaticis separationis, lineis productionis automaticis, etc., ad motum et positionem moderandam adhiberi possunt.
Impressio Tridimensionalis:In agro impressionis tridimensionalis, motores gradatim hybridi 86mm adhibentur ad positionem et motum capitis impressoris regendum, ut operationes impressionis accuratae perficiantur.
Instrumenta Medica:Motores gradatim hybridi 86mm late in instrumentis medicis adhibentur, ut puta antliis syringeticae medicae, robotis medicis, apparatu medico perscrutationis, etc., ad accuratam positionis gubernationem et motus gubernationem.
Instrumenta telecommunicationis:Motores gradatim hybridi 86mm ad accuratam positionem et gubernationem in apparatu telecommunicationis adhiberi possunt, ut puta in systemate positionis antennarum communicationis, et accurata gubernatione apparatuum fibrae opticae.
Machinae textiles:In industria textili, motores gradatim hybridi 86mm ad machinas filatorias, telas, aliasque machinas regendas adhiberi possunt, ut accuratio et stabilitas processus textili praestetur.
Robotica:Motores gradatim hybridi 86mm in variis applicationibus roboticis, inter quas robota industrialia, robota servitialia, robota collaborativa, et cetera, ad motum et operationem accuratam adhiberi possunt.
Systema Repositoria Automata:In systematibus automaticis repositionis et logisticae, motores gradatim hybridi 86mm adhiberi possunt ad taenias transportatorias, elevatoria, acervos et alia instrumenta regenda, ut accurata rerum positione et tractatione assequantur.
Commodum
Motus lenis et accuratus:Motores gradatim hybridi 86mm propter innatam resolutionem graduum motum lenem et accuratum consequi possunt. Hoc positionem accuratam et motum lenem permittit, periculum vibrationum minuens et functionem summae qualitatis praebens.
Magnum momentum torquens ad celeritates lentas:Motores gradatim hybridi magnum momentum rotatorium etiam parvis velocitatibus praebent, ita ut apti sint ad usus qui magnum momentum rotatorium vel torquendi initiandi requirunt. Haec proprietas praecipue utilis est in condicionibus ubi motor positionem contra vires externas conservare debet.
Lata varietas resolutionum graduum:Motores gradatim hybridi 86mm amplam resolutionum graduum seriem offerunt, ita ut motus subtiliter moderetur. Utentibus technicis microgradualibus, motor quemque gradum in subgradus minores dividere potest, quo fit ut motus lenior et accuratio positionis aucta sit.
Faciles ad impellendum et regendum: Motores gradatim hybridi simplicem architecturam impellendi et regendi habent, plerumque signis impulsuum et directionis utentes. Hoc eos facilem reddit integrationem in varia systemata regendi, complexitatem et tempus evolutionis minuens.
Alta fides et firmitas:Motores gradatim hybridi 86mm propter robustatem et longam vitam operationis noti sunt. Conditiones operationis difficiles, ut variationes temperaturae et tensiones mechanicas, tolerare possunt, sine detrimento efficaciae.
Solutio sumptibus parcis:Motores gradatim hybridi solutionem sumptibus parvam offerunt, comparati cum aliis technologiis moderationis motus, ut motoribus servo. Bonum aequilibrium inter efficaciam et sumptum praebent, ita ut apti sint ad usus ubi rationes pecuniariae magni momenti sunt.
Applicationes versatiles:Motores gradatim hybridi 86mm applicationes inveniunt in variis industriis, inter quas robotica, automatio, fabricatione, impressione tridimensionali, apparatu medico, et pluribus. Eorum versatilitas permittit ut adhibeantur in ampla varietate applicationum quae accuratam positionem et moderationem requirunt.
Requisita Selectionis Motoris:
►Directio motus/impositio
►Requisita Oneris
►Requisita Ictus
►Requisita machinationis finalis
►Requisita Praecisionis
►Requisita Responsionis Encoderis
►Requisita Adaptationis Manualis
►Requisita Ambientalia
Officina productionis


-300x300.jpg)
-300x300.jpg)
-300x300.jpg)
-300x300.jpg)
-300x300.jpg)