Circuitus claususmotores gradualesRationem inter efficaciam et sumptum in multis applicationibus moderationis motus mutaverunt. Successus motorum progressivorum VIC in circuitu clauso etiam possibilitatem aperuit substituendi servomotores pretiosos cum motoribus vilis pretii.motores gradualesIn crescente numero applicationum automationis industrialis altioris normae, progressus technologici rationem efficaciae ad sumptum inter motores graduales et motores servomotores mutant.
Motores graduales contra motores servomotores
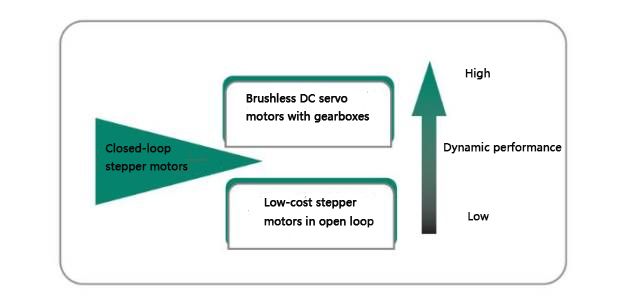
Secundum opinionem vulgatam, systemata servo-regulationis melius funguntur in applicationibus ubi celeritates supra 800 RPM et responsio dynamica magna requiruntur. Motores graduales aptiores sunt applicationibus cum celeritatibus inferioribus, acceleratione parva vel media et momento torquenti magno.
Quid igitur est fundamentum huius sapientiae vulgaris de motoribus gradatim moventibus et motoribus servomotoribus? Eam infra fusius analyzemus.
1. Simplicitas et sumptus
Motores gradatim moventes non solum viliores sunt quam servomotores, sed etiam simpliciores in usum et sustentationem adhibentur. Motores gradatim moventes stabiles sunt stantes et positionem suam tenent (etiam cum oneribus dynamicis). Attamen, si maior efficacia requiritur pro quibusdam applicationibus, servomotores cariores et complexiores adhibendi sunt.
2. Structura
Motores gradualesGradatim rotant, spiralibus magneticis utentes ad paulatim magnetem ex uno loco in proximum trahendum. Ad motorem centum locos in quavis directione movendum, circuitus centum operationes graduales in motore perficiendas requirit. Motores graduales pulsibus utuntur ad motus incrementales efficiendos, permittentes positionem accuratam sine usu ullius sensorii retroactionis.
Modus motus motoris servomotoris differt. Sensorem positionis — id est, encoder — rotori magnetico connectit et positionem exactam motoris continenter detegit. Servomotor differentiam inter positionem actualem motoris et positionem imperatam observat et currentem proinde adaptat. Hoc systema circuli clausi motorem in statu motus correcto servat.

3. Celeritas et momentum torquens
Differentia in effectu inter motores graduales et servomotores ex diversis solutionibus designandi motores oritur.Motores gradualesNumero polorum multo maiore quam servomotores habent, itaque plena revolutio motoris gradualis multo plures commutationes currentiae convolutionis requirit, quod ad rapidam diminutionem momenti torquentis ad celeritates crescentes ducit. Praeterea, si momentum torquens maximum attingitur, motor gradualis functionem synchronizationis celeritatis amittere potest. Ob has causas, servomotores solutio praeferenda sunt in plerisque applicationibus altae celeritatis. Contra, maior numerus polorum motoris gradualis utilis est ad celeritates inferiores, cum motor gradualis commodum momenti torquentis prae servomotore eiusdem magnitudinis habet.
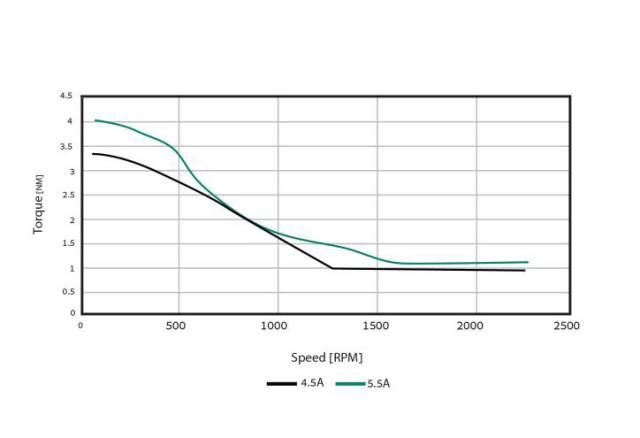
Cum celeritas crescit, momentum motoris gradatim decrescit.
4. Positio
Sunt differentiae magni momenti inter motores graduales et servomotores in applicationibus ubi positio exacta machinae omni tempore scienda est. In applicationibus motus circuli aperti a motoribus gradualibus gubernatis, systema moderandi assumit motorem semper in statu motus correcto esse. Attamen, postquam problema occurrit, ut motor haesit propter componentem haerentem, moderator non potest positionem veram machinae cognoscere, quod ad amissionem positionis ducere potest. Systema circuli clausi servomotoris ipsius commodum habet: si obiecto haereat, id statim deteget. Machina operari desinet et numquam ex loco suo erit.
5. Consumptio caloris et energiae
Motores gradatim in circuitu aperto currentem fixum utuntur et multum caloris emittunt. Moderatio in circuitu clauso tantum currentem requisitum pro circuitu celeritatis praebet et ideo problema calefactionis motoris vitat.
Summarium comparationis
Systemata servomotorum gubernationis aptissima sunt applicationibus celeribus quae mutationes dynamicas oneris implicant, ut puta brachia robotica. Systemata graduum gubernationis, contra, aptiora sunt applicationibus quae accelerationem lenem vel mediam et momentum tenax magnum requirunt, ut puta impressores tridimensionales, convectores, subaxes, et cetera. Quia motores graduum viliores sunt, sumptum systematum automationis minuere possunt cum adhibentur. Systemata gubernationis motus quae commodis proprietatum servomotorum uti debent demonstrare debebunt hos motores pretiosiores auro suo pondere dignos esse.
Motores graduales cum imperio circuli clausi
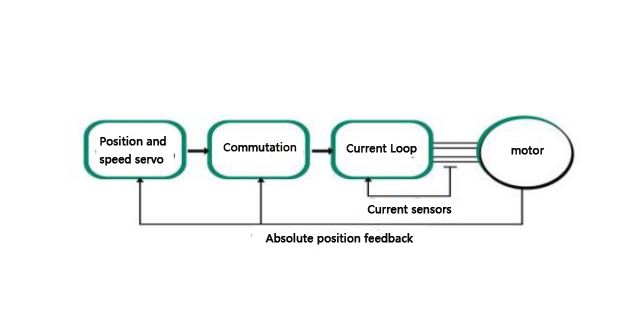
Motor gradualis cum moderamine electronico integrato aequivalet motori DC biphasico sine spazzolis et potest moderamen circuitus positionis, moderamen circuitus celeritatis, moderamen DQ, aliosque algorithmos perficere. Encoder absolutus unius rotae ad commutationem circuitus clausi adhibetur, ita momentum torquens optimum ad quamlibet celeritatem praestans.
Consumptio energiae humilis et refrigeratio servanda
Motores gradatim VIC magnam efficaciam energiae praebent. Dissimiles motoribus gradatim in circuitu aperto, qui semper pleno imperio currentis operantur et problemata caloris et strepitus causant, currentis mutatur secundum condiciones reales motus, exempli gratia durante acceleratione et retardatione. Similiter ac servomotoribus, currentis ab his motoribus gradatim quovis momento consumptio proportionalis est momento torquenti vero requisito. Quia motor et tabula electronica integrata frigidius currunt, motores gradatim VIC momenta torquentia maxima comparabilia cum servomotoribus consequi possunt.
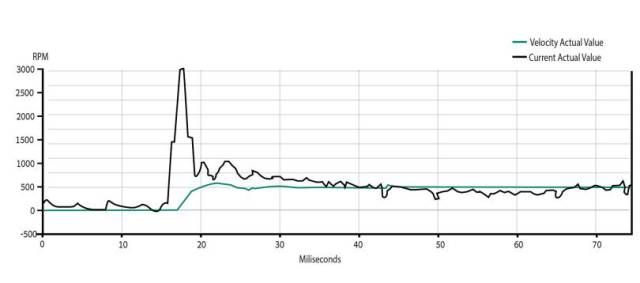
Etiam magnis celeritatibus, motores gradatim VIC minus currentis requirunt.
Progressu in technologia circuitus clausi impulsi, motores graduales in applicationes altae efficacitatis et celeritatis penetrare possunt, quae antea solis motoribus servo pertinebant.
Motores graduales cum technologia circuitus clausi
Quid si commoda technologiae servo-circuitus clausi ad motores graduales adhiberi possent?
Num comparabilem efficaciam motoribus servo consequi possimus, simul commodis sumptuum motorum gradualium fruentibus?
Coniuncta technologia moderationis circuitus clausi, motor gradatim movens productum completum cum commodis tam motorum servomotorum quam motorum gradatim moventium pretio vili evaderet. Quia motores gradatim moventes circuitus clausi meliorationes significantes in effectu et efficacia energiae offerunt, motores servomotores cariores in numero crescente applicationum altioris normae substituere possunt.
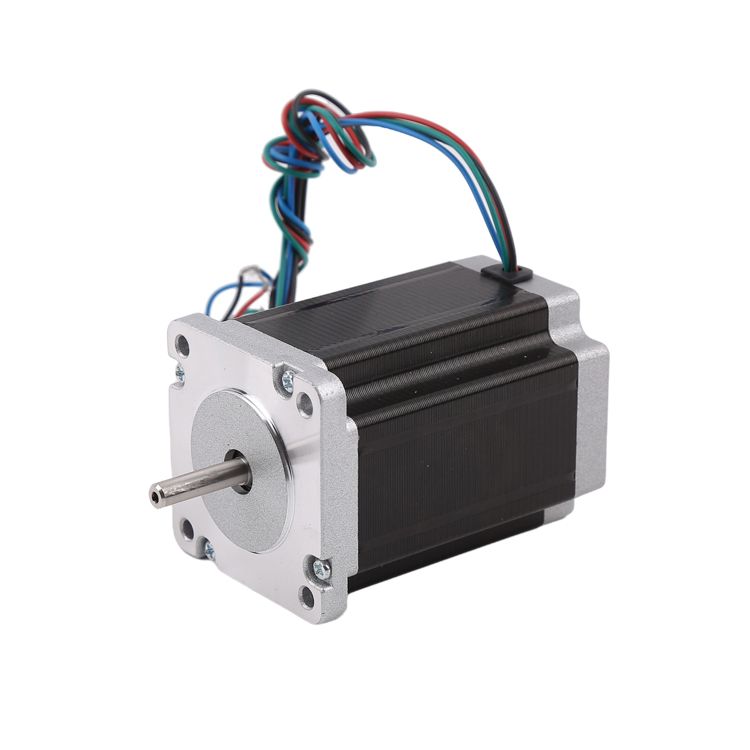
Exemplum sequens est motoris gradatim integrati VIC cum imperio circuitus clausi incluso ad explicandas functiones et commoda ac incommoda motorum gradatim cum technologia circuitus clausi.
Requisita perfunctionis accurate congruentia
Ut satis momenti torques praestetur ad perturbationes superandas et gradus amissi vitandos, motores gradatim circuli aperti plerumque curare debent ut momentum torques saltem 40% maius sit quam valor ab applicatione requisitus. Motores gradatim circuli clausi hodie hoc problema non habent. Cum hi motores gradatim propter nimium onus sistunt, onus sustinere pergent sine momento torques amittendo. Postquam condicio nimii oneris sublata est, operari pergent. Momentum torques maximum ad quamlibet celeritatem datam garantiri potest et sensor positionis efficit ut nulla sit gradus amissio. Motores gradatim circuli clausi ergo specificari possunt ut exacte requisitis momenti torques applicationis pertinentis respondeant sine necessitate marginis 40% additi.
Cum motoribus gradatim in circuitu aperto, difficile est requisitis momenti torquendi instantanei altis satisfacere propter periculum graduum amittendorum. Comparati cum motoribus gradatim conventionalibus, motores gradatim VIC in circuitu clauso accelerationem celerrimam, strepitum operationis humilem et resonantiam humilem consequi possunt. Multo maioribus latitudinibus operari et praeclaram efficaciam consequi possunt.
Nullum armarium
Toda tabulam moderatricem motoris cum motore integrat, quo fit ut numerus filorum minuatur et solutio implementationis facilior fiat. Cum Toda, machinas sine armariis fabricare potes.
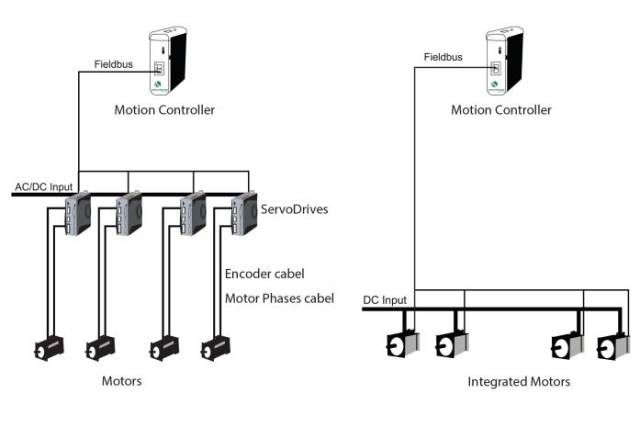
Integratio electronicarum cum motoribus gradatim conficiendis complexitatem minuit.
Cum technologia circuitus clausi, motores gradatim circuli clausi usoribus praeclaram accuratiam et efficaciam offerunt, cum effectu servomotoris et pretio vili motoris gradatim. Motores gradatim minoris pretii paulatim applicationes penetrant quae aliter a servomotoribus magni pretii dominarentur.
Tempus publicationis: Apr-10-2023