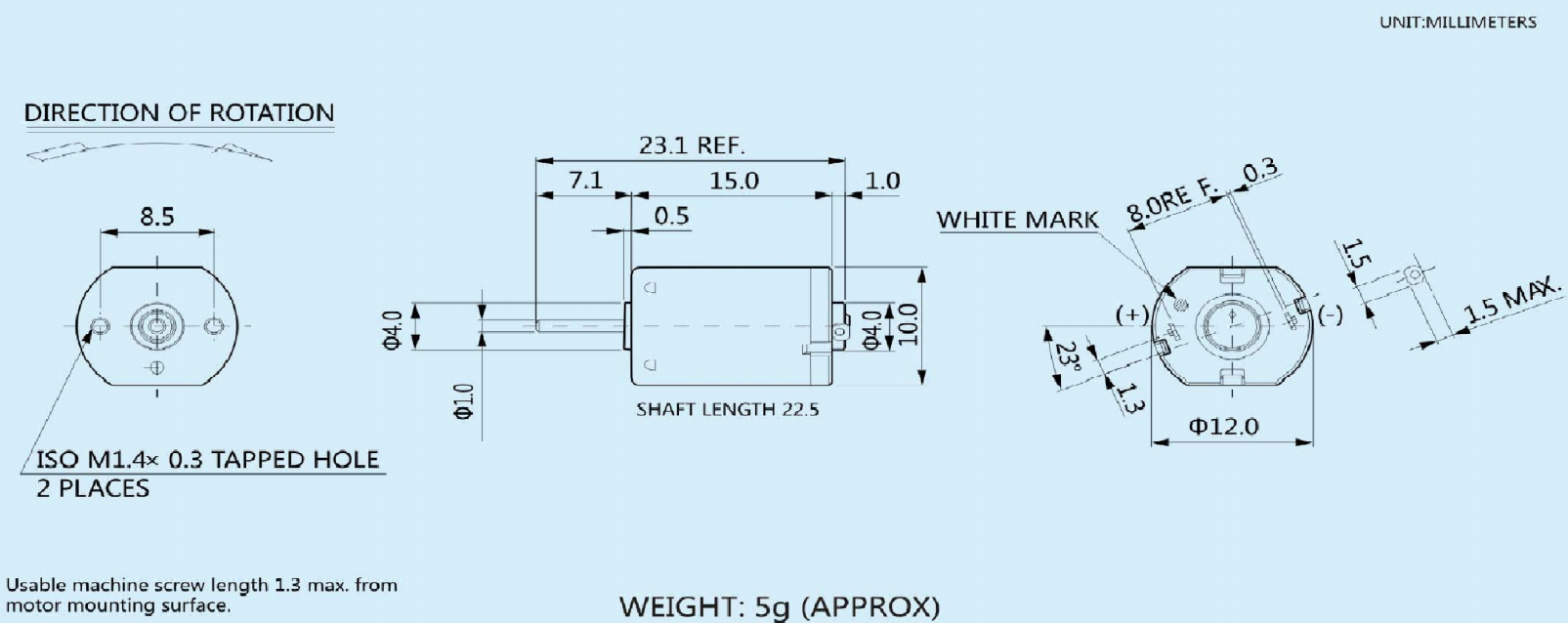
Motor N20 DCdelineatio (motor DC N20 diametrum 12mm, crassitudinem 10mm et longitudinem 15mm habet, longior longitudo est N30 et brevior longitudo est N10)

Motor N20 DCparametri.
Effectus:
1. genus motoris: motor DC penicillorum
2. Tensio electrica: 3V-12VDC
3. Celeritas rotationis (otiosa): 3000rpm-20000rpm
4. Momentum torquens: 1g.cm-2g.cm
5. Diametros axis: 1.0mm
6. Directio: Dextra/ Contraria
7. Ferculum axis emissi: ferculum olei
8. Res configurabiles: longitudo axis (axis codificatore instructus esse potest), tensio, celeritas, modus exitus fili, et connector, etc.
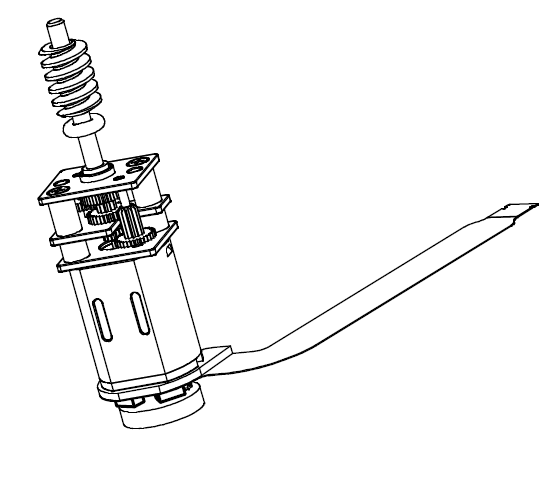
Motor N20 DC producta ad usum singularum rerum, casus realis (Transformatores)
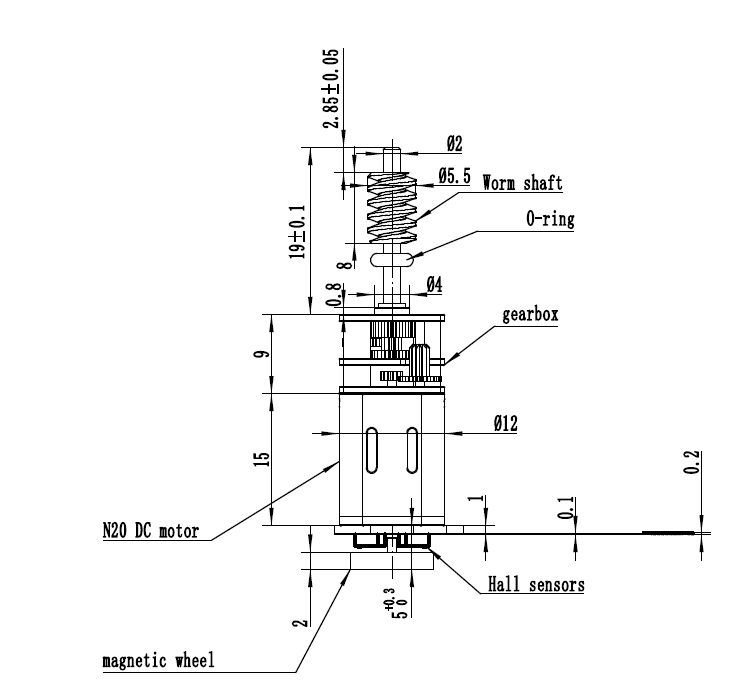
Motor N20 DC + capsa rotarum + axis vermis + codificator inferior + FPC consuetus + anulus gummeus in axe
Curva functionis motoris N20 DC (versio 12V 16000 celeritatis sine onere).
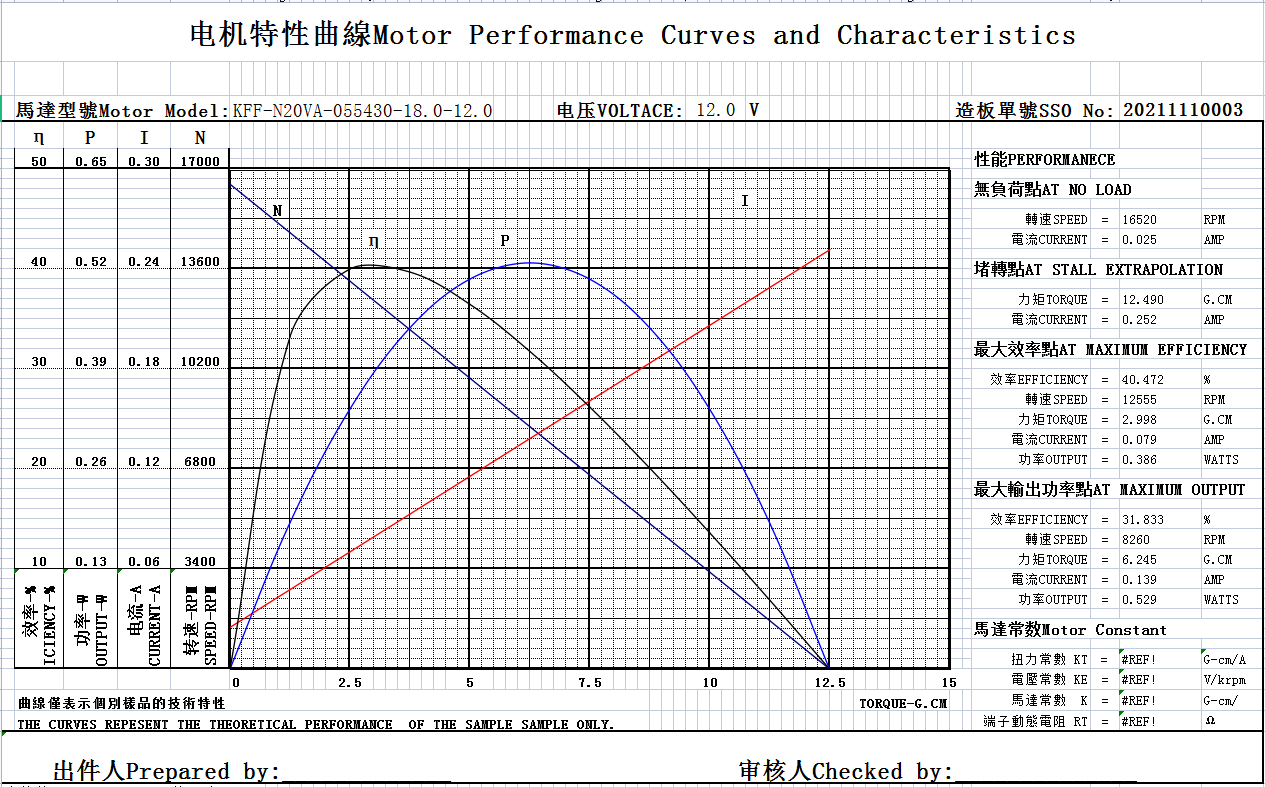
Proprietates et methodi probationisMotor DC.
1. ad tensionem nominalem, celeritate maxima, minimo currente, cum onus crescit, celeritas minor fit, currente maior fit, donec motor obstruatur, celeritas motoris fit 0, currente maximo est.
2. quo altior tensio, eo velocior celeritas motoris
Normae generales inspectionis navium.
Examen celeritatis sine onere: exempli gratia, potentia nominalis 12V, celeritas sine onere 16000RPM.
Norma probationis sine onere inter 14400~17600 RPM (errore 10%) esse debet, alioquin mala est.
Exempli gratia: fluxus electricus sine onere intra 30mA esse debet, alioquin malus est.
Onus specificatum adde; celeritas celeritatem specificatam supra esse debet.
Exempli gratia: motor N20 DC cum capsa rotarum 298:1, onus 500g*cm, revolutiones per minutum (RPM) supra 11500RPM esse debent. Alioquin, malum est.
Data probationis actualis motoris N20 DC rectilinii.
Dies probationis: XIII Novembris, MMXXII
Probator: Antonius, ingeniarius Vikotecensis
Locus probationis: officina Vikotec
Productum: Motor N20 DC + capsa cistae
Tensio probationis: 12V
Velocitas motoris sine onere signata: 16000RPM
Grex: Secunda grex mense Iulio
Ratio reductionis: 298:1
Resistentia: 47.8Ω
Velocitas sine onere sine capsa dentata: 16508 RPM
Currens sine onere: 15mA
| Numerus serialis | Currens sine onere (mA) | Celeritas sine onere(RPM) | 500g*cmCurrens oneris (mA) | Celeritas oneris 500g*cm(RPM) | Currens obstruens(RPM) |
| 1 | 16 | 16390 | 59 | 12800 | 215 |
| 2 | 18 | 16200 | 67 | 12400 | 234 |
| 3 | 18 | 16200 | 67 | 12380 | 220 |
| 4 | 20 | 16080 | 62 | 12400 | 228 |
| 5 | 17 | 16400 | 68 | 12420 | 231 |
| Valor medius | 18 | 16254 | 65 | 12480 | 226 |
Grex: Secunda grex mense Iulio
Ratio retardationis: 420:1
Resistentia: 47.8Ω
Velocitas sine onere sine capsa cistae: 16500RPM
Currens sine onere: 15mA
| Numerus serialis | Currens sine onere (mA) | Celeritas sine onere(RPM) | 500g*cmCurrens oneris (mA) | Celeritas oneris 500g*cm(RPM) | Currens obstruens(RPM) |
| 1 | 15 | 16680 | 49 | 13960 | 231 |
| 2 | 25 | 15930 | 60 | 13200 | 235 |
| 3 | 19 | 16080 | 57 | 13150 | 230 |
| 4 | 21 | 15800 | 53 | 13300 | 233 |
| 5 | 20 | 16000 | 55 | 13400 | 238 |
| Valor medius | 20 | 16098 | 55 | 13402 | 233 |
Grex: Tertia grex mense Septembri
Ratio retardationis: 298:1
Resistentia: 47.6Ω
Velocitas sine onere sine capsa dentata: 15850RPM
Currens sine onere: 13mA
| Numerus serialis | Currens sine onere (mA) | Celeritas sine onere(RPM) | 500g*cmCurrens oneris (mA) | Celeritas oneris 500g*cm(RPM) | Currens obstruens(RPM) |
| 1 | 16 | 15720 | 64 | 12350 | 219 |
| 2 | 18 | 15390 | 63 | 12250 | ducenti |
| 3 | 18 | 15330 | 63 | 11900 | 219 |
| 4 | 20 | 15230 | 62 | 12100 | 216 |
| 5 | 18 | 15375 | 61 | 12250 | 228 |
| Valor medius | 18 | 15409 | 63 | 12170 | 216 |
Grex: Tertia grex mense Septembri
Ratio reductionis: 420:1
Resistentia: 47.6Ω
Velocitas sine onere sine capsa dentata: 15680RPM
Currens sine onere: 17mA
| Numerus serialis | Currens sine onere (mA) | Celeritas sine onere(RPM) | 500g*cmCurrens oneris (mA) | Celeritas oneris 500g*cm(RPM) | Currens obstruens(RPM) |
| 1 | 18 | 15615 | 54 | 12980 | 216 |
| 2 | 18 | 15418 | 49 | 13100 | 210 |
| 3 | 18 | 15300 | 50 | 12990 | 219 |
| 4 | 17 | 15270 | 50 | Tredecim milia | 222 |
| 5 | 16 | 15620 | 50 | 13160 | 217 |
| Valor medius | 17 | 15445 | 51 | 13046 | 217 |
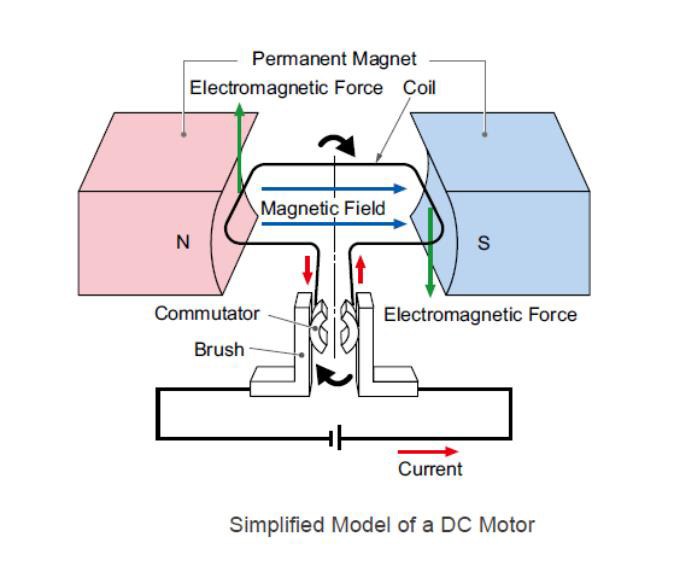
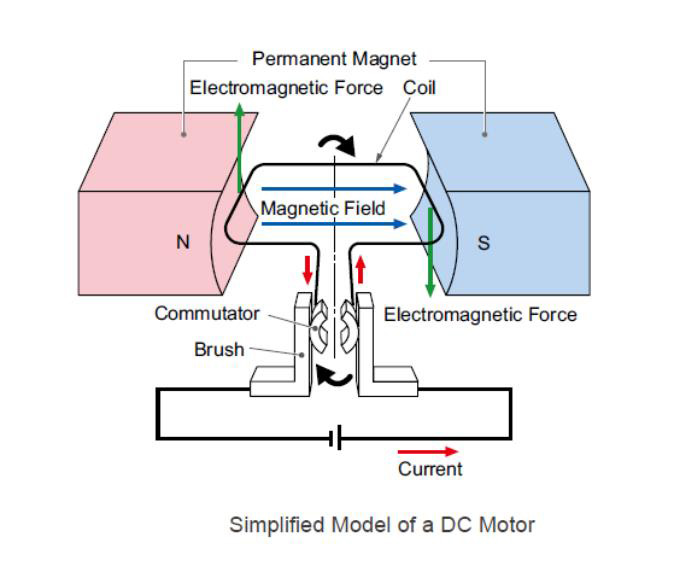
Principium operationis motoris N20 DC.
Conductor excitatus in campo magnetico vim in certa directione subiectus est.
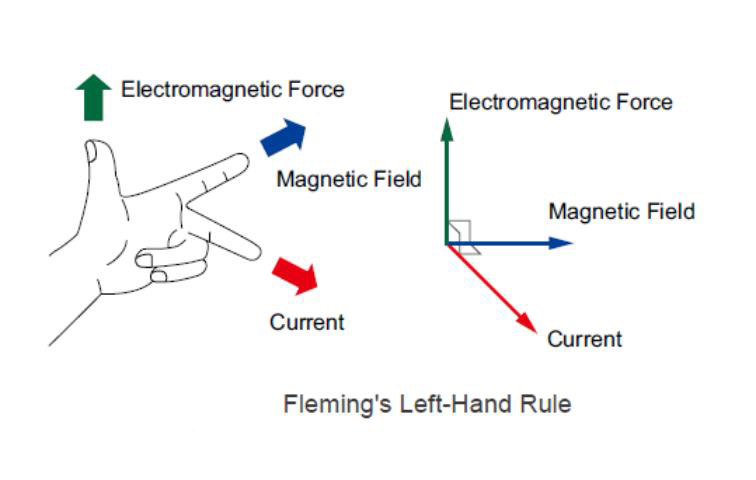
Regula Flemingi de sinistra manu.
Directio campi magnetici est digitus index, directio currentis est digitus medius, et directio vis est directio pollicis.
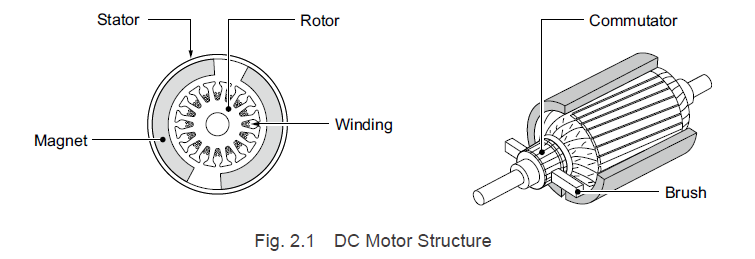
Structura interna motoris N20 DC.
Analysis directionis cui rotor (spira) in motore DC subicitur1.
Subiecta directioni vis electromagneticae, spira dextra versus movebitur, directione vis electromagneticae filo applicatae a sinistra (sursum spectante) et directione vis electromagneticae huic filo applicatae a dextra (deorsum spectante).
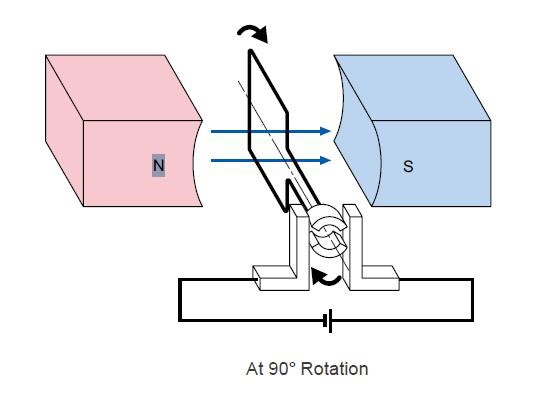
Analysis directionis cui rotor (spira) in motore subiectus est.
Cum spira perpendicularis est campo magnetico, motor vim campi magnetici non accipit. Attamen, propter inertiam, spira per breve spatium moveri perget. Hoc uno momento, commutator et penicilli non in contactu sunt. Cum spira dextra versus rotare pergit, commutator et penicilli in contactu sunt.Hoc directionem currentis mutare faciet.
Analysis directionis cui rotor (spira) in motore subiectus est 3.
Ob commutatorem et peniculos, directionem cursus electrici mutat semel in dimidia rotatione motoris. Hoc modo, motor perget rotare secundum horam. Quia commutator et peniculi necessarii sunt ad motum continuum motoris, motor N20 DC appellatur: "Motor Peniculus"
Directio vis electromagneticae filo a sinistra (sursum spectante) et filo a dextra applicatae
Directio vis electromagneticae (deorsum spectans)
Commoda motoris N20 DC.
1. Vile
2. celeritas rotationis celeris
3. simplex nexus filorum, duo paxilli, unus positivo, alter negativo coniunctus, inserere et lusere
4. Efficacia motoris altior est quam motoris gradualis.
Tempus publicationis: XVI Kalendas Decembres, anno MMXXII