Motor gradualis est motor electricus qui energiam electricam in energiam mechanicam convertit, cuius momentum rotatorium et celeritas accurate regi possunt per moderationem fontis potentiae.
I, commoda motoris gradualis
Alta praecisio
Angulus rotationis motoris gradatim proportionalis est numero impulsuum ingressorum, ita numerum et frequentiam impulsuum accurate moderari potest ut accurata sit moderatio positionis et celeritatis motoris. Haec proprietas motores gradatim excellere facit in applicationibus quae positionem altae praecisionis requirunt, ut machinis instrumentis CNC, prelis typographicis, et machinis textilibus.
Motores gradatim moventes plerumque praecisionem inter 3% et 5% per gradum habent nec errorem a gradu praecedenti ad proximum accumulant, id est errores cumulativos non generant. Hoc significat motores gradatim moventes posse magnam praecisionem positionis et repetibilitatem motus per longas temporis periodos vel motum continuum conservare.
Summe regibilis

Operatio motoris gradatim moventis per moderationem currentis pulsatilis efficitur, ita moderatio motoris per programmationem programmatis fieri potest. Haec programmabilitas permittit motores gradatim moventes necessitatibus amplae varietatis applicationum, ut linearum productionis automatarum, roboticae, et aliorum camporum, satisfacere.
Cum responsio motoris gradatim tantum impulsu input determinetur, gubernatio ansae apertae adhiberi potest, quae structuram motoris simpliciorem et minus sumptuosam ad gubernandum reddit. Gubernatio ansae apertae etiam complexitatem systematis et sumptus sustentationis minuit.
Magnum momentum torquens ad celeritates lentas
Motores gradatim moventes magnum momentum rotatorium ad celeritates lentas habent, quod eos excellentes reddit in applicationibus quae celeritatem lenem et momentum rotatorium magnum requirunt, ut machinae automaticae inscriptionum et machinae involucrorum.
Motores graduales momentum maximum habent cum stant, proprietas quae eos utiles reddit in applicationibus ubi stabilitas positionis vel resistentia oneribus externis requiritur.
Alta fidelitas

Motores gradatim peniculos carent, ita vitia et strepitum propter detritionem peniculorum minuentes. Hoc motores gradatim valde certos reddit, cum vita motoris magnopere a vita fulcrorum pendeat.
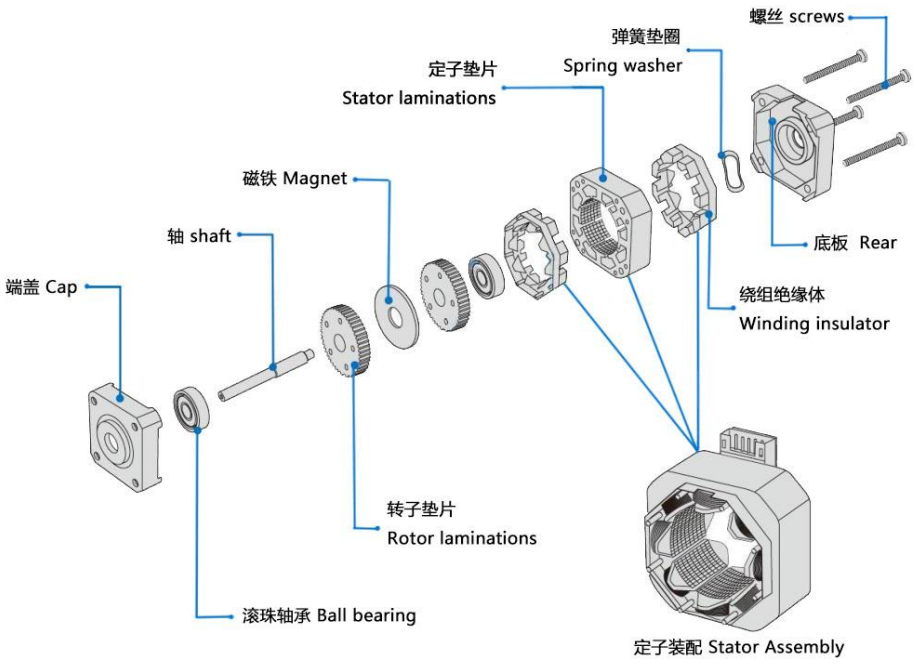
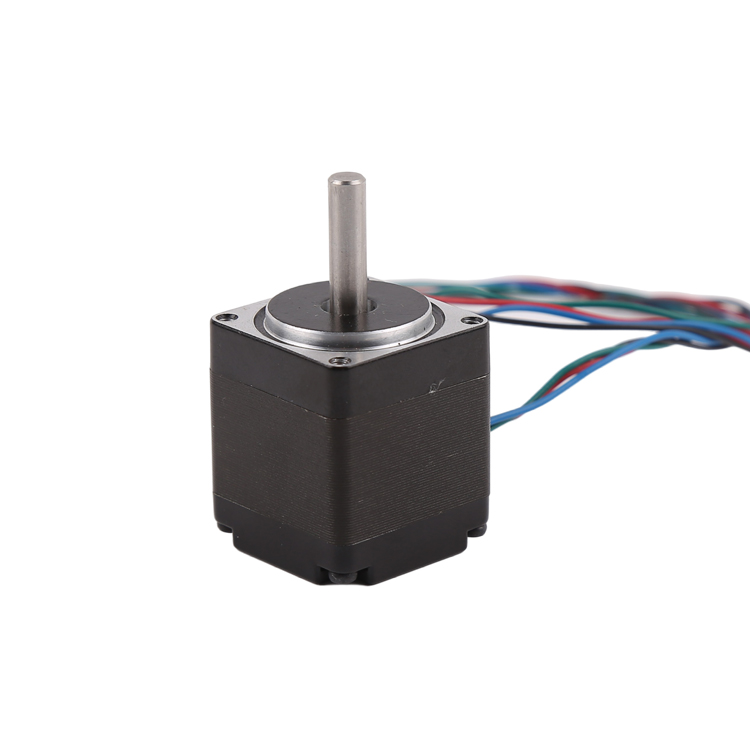
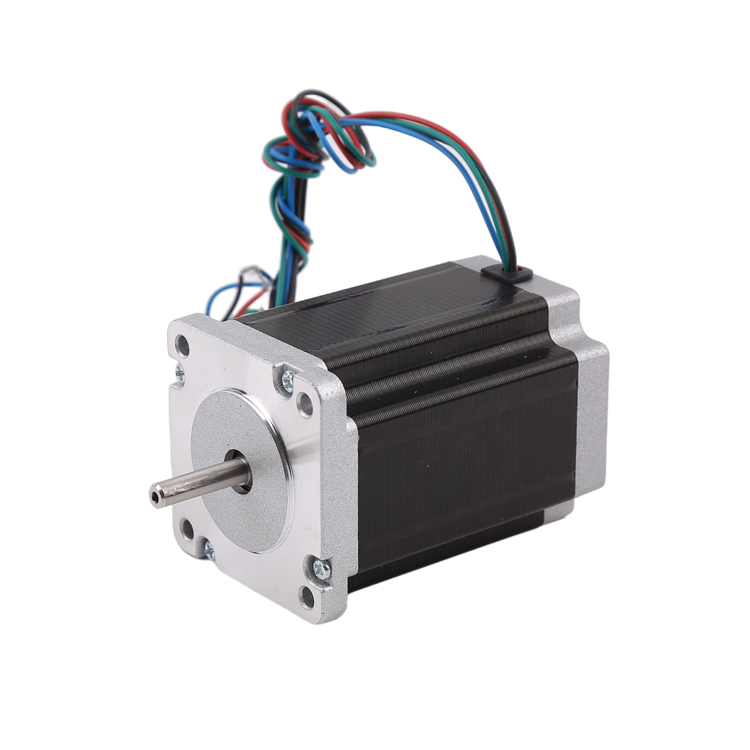
Motores graduales structuram simplicem habent, tribus partibus constantem: motore ipso, impulsore et moderatore, quae institutionem et sustentationem relative facilem reddunt.
Lata celeritatis amplitudo

Motores gradatim moventes celeritatem satis magnam habent, et celeritas motoris per frequentiam impulsuum adaptandam mutari potest. Hoc permittit motori gradatim moventi se ad varias celeritates laboris et requisita oneris accommodare.
Bonus Initium-Sistitio et Responsio Reversa
Motores gradatim celeriter signis moderandis respondent cum incipiunt et sistunt, et magnam praecisionem ac stabilitatem servant cum retrocedunt. Haec proprietas motorem gradatim commodum praebet cum frequentes initiationes et cessationes necnon inversiones applicationis requirunt.
II, incommoda motorum gradualium
Facile gradum amittere vel excedere
Nisi recte regantur, motores gradatim movendi vel excessivi gradus obnoxii sunt. "Excessus gradus" significat motorem non posse rotare secundum numerum passuum praefinitum, "excessus gradus" autem significat motorem plus quam numerum passuum praefinitum rotari. Utrumque horum phaenomenorum iacturam accuratae positionis motoris efficit et functionem systematis afficit.
Generatio excessus gradus et excessus gradus cum factoribus ut onus motoris, celeritas rotationis, et frequentia atque amplitudo signi moderandi coniungitur. Quapropter, cum motoribus gradatim utuntur, hi factores diligenter considerandi sunt et congruae mensurae adhibendae sunt ad vitandam eventum excessus gradus et excessus gradus.
Difficultas in celeritatibus rotationis altis attingendis
Celeritas rotationis motoris gradatim moventis principio operationis limitatur, et plerumque difficile est celeritatem rotationis magnam consequi. Quamquam celeritatem motoris augere licet frequentia signi moderandi aucta, frequentia nimis alta ad problemata, ut calefactionem motoris, strepitum auctum, et etiam motorem laedere potest, ducet.
Quapropter, cum motoribus gradatim uteris, necesse est celeritatis ambitum aptum secundum requisita applicationis eligere et vitare cursus magnorum velocitatum per longum tempus.
Sensibilis mutationibus oneris
Motores graduales moderationem numeri et frequentiae pulsus currentis in tempore reali requirunt dum operantur, ut accurata moderatio positionis et celeritatis fiat. Attamen, si magnae mutationes oneris fiunt, pulsus currentis moderandi perturbabitur, quod motum instabilem et etiam gradus immoderatos efficiet.
Ad hanc difficultatem solvendam, systema moderationis circuli clausi adhiberi potest ad positionem et celeritatem motoris monitorandam et signum moderationis secundum condicionem actualem accommodandum. Attamen hoc complexitatem et sumptum systematis augebit.
Efficacia humilis
Cum motores gradatim moventes inter constantem cessationem et initium regantur, eorum efficientia relative humilis est comparata cum aliis generibus motorum (e.g., motoribus DC, motoribus AC, etc.). Hoc significat motores gradatim moventes plus potentiae consumere pro eadem potentia emissa.
Ad efficientiam motorum gradualium augendam, mensurae ut algorithmos moderationis optimizandos et damna motorum reducendos adhiberi possunt. Attamen, harum mensurarum implementatio certum technologiae et sumptus requirit.
III, ambitus applicationis motorum gradualium:
Motores gradatim moventes (vel "gradatim moventes") in multis campis late adhibentur propter sua commoda singularia et quasdam limitationes. Sequitur disceptatio accurata de ambitu applicationis motorum gradatim moventium:
Robotica et systemata automationis
Motores gradatim moventes late in robotis industrialibus, lineis productionis automatis, aliisque campis adhibentur. Celeritatem motus et directionem robotorum accurate regere possunt, positionem summae praecisionis necnon responsum celerem in processibus productionis automatis efficiunt.
Machinae Instrumentales CNC

Impressores

Motores gradatim moventes adhibentur ad motum capitis impressoris regendum in machinis ut impressoribus atramenti et lasericis. Motu motoris accurate regendo, impressio textuum et imaginum altae qualitatis effici potest. Haec proprietas motores gradatim moventes late in apparatu impressorio adhiberi facit.
Instrumenta Medica

Motores gradatim moventes in apparatu imaginum medicarum (exempli gratia, machinis radiographicis, tomographis computatis, etc.) adhibentur ad motum structurae scansionis impellendum. Motu motoris accurate gubernato, celeris et accurata imago aegroti fieri potest. Haec proprietas motores gradatim moventes munus magnum in apparatu medico agere facit.
Aerospatiale

Motores gradatim moventes (vel "stepper motors") ad motum actuatorum in apparatu aëronautico, ut puta in moderatione status satellitum et systematibus propulsionis rochetarum, moderandum adhibentur. Motores gradatim moventes bonam functionem sub requisitis magnae praecisionis et altae stabilitatis exhibent. Haec proprietas motores gradatim moventes partem magni momenti campi aëronautici facit.
Instrumenta Ludorum et Delectationis

Motores gradatim moventes adhibentur ad motum actuatorum in machinis ut machinis lasericis incisoribus, impressoribus tridimensionalibus, et moderatoribus ludorum electronicorum moderandum. In his machinis, accurata gubernatio motorum gradatim moventium maximi momenti est ad productum altae qualitatis et optimam experientiam usoris consequendam.
Educatio et Investigatio

Motores gradatim moventes adhibentur ad motum suggestuum experimentalium moderandum in condicionibus ut instrumentis laboratorium et apparatu didactico. In educatione, sumptus humilis et magna accuratio motorum gradatim moventium eos instrumenta didactica idealia reddunt. Utentibus proprietatibus moderationis accuratis motorum gradatim moventium, discipulis adiuvare possunt ut principia physicae et machinalis melius intellegant.
Summa summarum, motores gradatim moventes praestant commoda magnae praecisionis, moderabilitatis, celeritatis lentae et momenti magni, necnon magnae firmitatis, sed etiam incommoda habent, quod facile a gradu discedunt vel discedunt, difficulter altas celeritates rotationis attinguntur, sunt sensibiles mutationibus oneris, et efficientiae parvae. Cum motores gradatim moventes eliguntur, necesse est eorum commoda et incommoda considerare, necnon ambitum applicationis secundum requisita applicationis, ut efficacia et stabilitas systematis confirmentur.
Tempus publicationis: XIV Novembris, MMXXIV