
DE NOBIS
Viginti annos periti in agro micromotorum cum plena serie facultatis OEM/ODM in agro micromotorum.

INTRODUCTIO
Societas Changzhou Vic-Tech Motor Technology Co., Ltd. in productione micromotorum et accessionum ab anno 2011 specializatur. Producta nostra praecipua: motores gradatim micro, motores cum dentibus rotatis, propulsores subaquanei et gubernatores motorum. Turmam investigationis et progressionis habemus, quae viginti annos in evolutione motorum peritiae habet, clientibus officia designandi et evoluendi secundum desideria clientium praebens. Nostra honestate, fide et qualitate utens, Vic-Tech Motor in venditionibus praestantiam servare intendit.
- -Conditum anno MMXI
- -Viginti annorum experientia
- -+Plus quam XVIII producta
- -$Plus quam quingenti miliones
Solutio






-
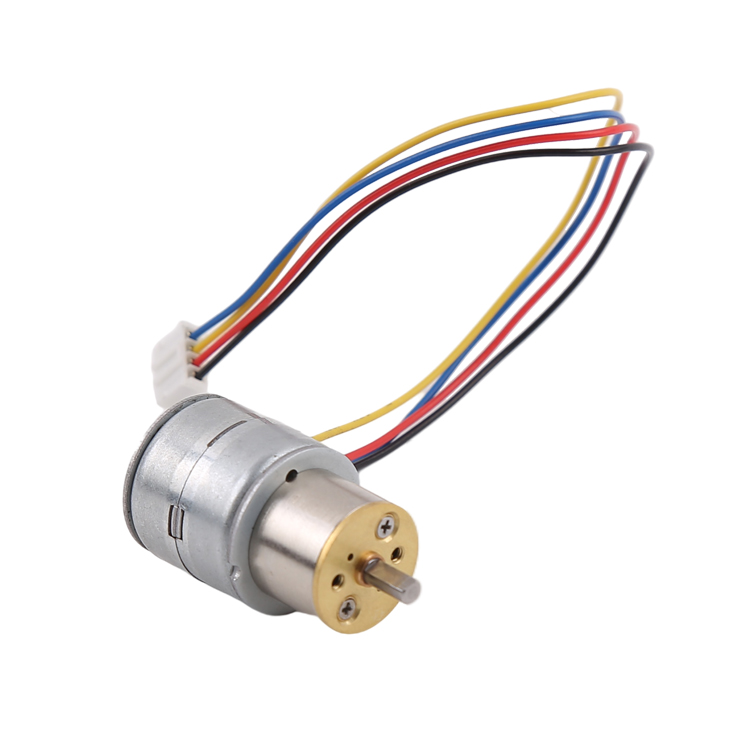
Motor N20 DC penicillo instructus...
Descriptio Hic est motor N20 DC cum capsa dentata 1024. Motor N20 DC etiam est motor DC penicillo cum velocitate sine onere circiter 15,000 RPM pro uno motore. Cum motor capsae dentatae connectus est, lentius et cum maiori momento torquendi currit. Axis egressus huius motoris est axis D-formatus et emptor etiam axem cochleatum eligere potest, si opus est. Capsae dentatae praesto sunt in sequentibus rationibus dentatae: 10:1, 30:1, 50:1, 100:1, 15...
-
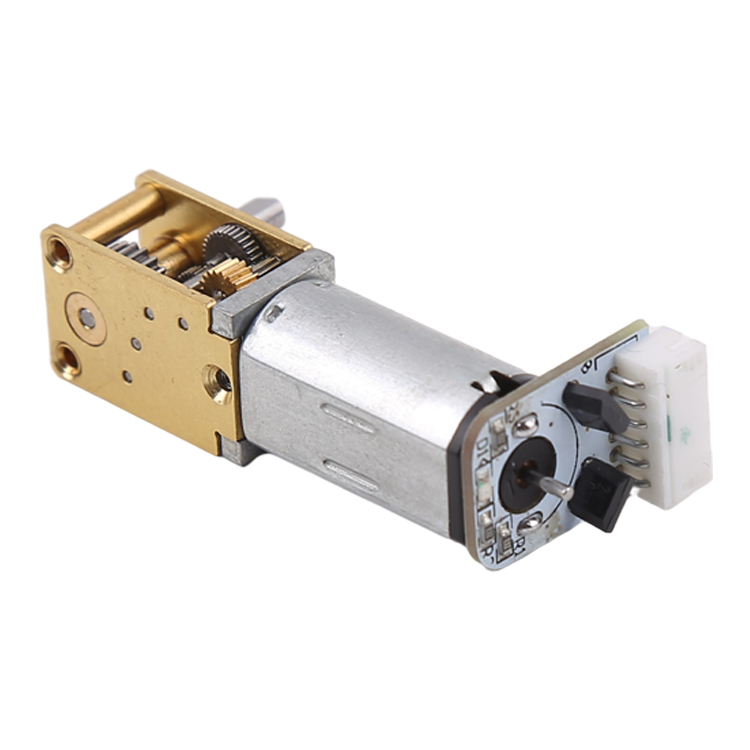
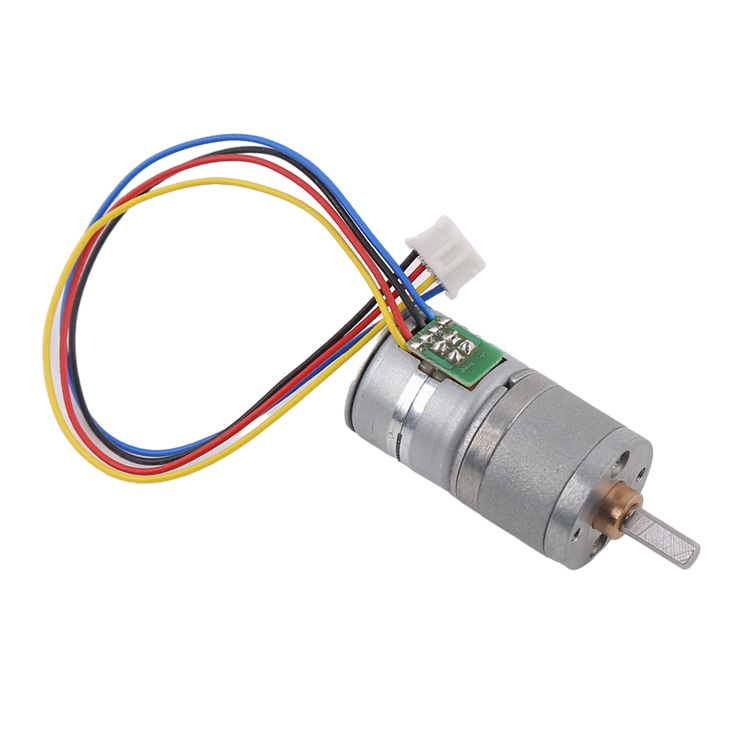
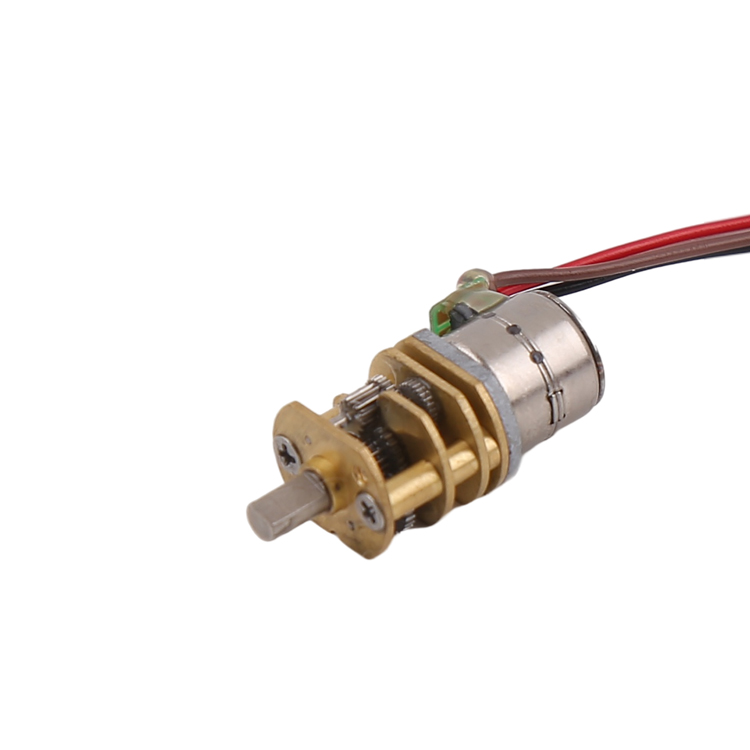
Capsa vermis N20 DC...
Descriptio Hic motor DC cum rotatione vermis et spirali (vel "cochlea rotatoria") cum codificatore N20 est. Etiam sine codificatore praesto est. Diameter exterior motoris N20 est 12mm*10mm, longitudo motoris est 15mm, et longitudo capsae rotatoriae est 18mm (capsa rotatoria etiam motorem N10 vel motorem N30 sustinere potest). Motor constat ex motore DC metallico perpolito cum reductore metallico praeciso. Rotatio vermis magnitudinem parvam et rationem transmissionis magnam habet. Technologia motoris DC relative...
-

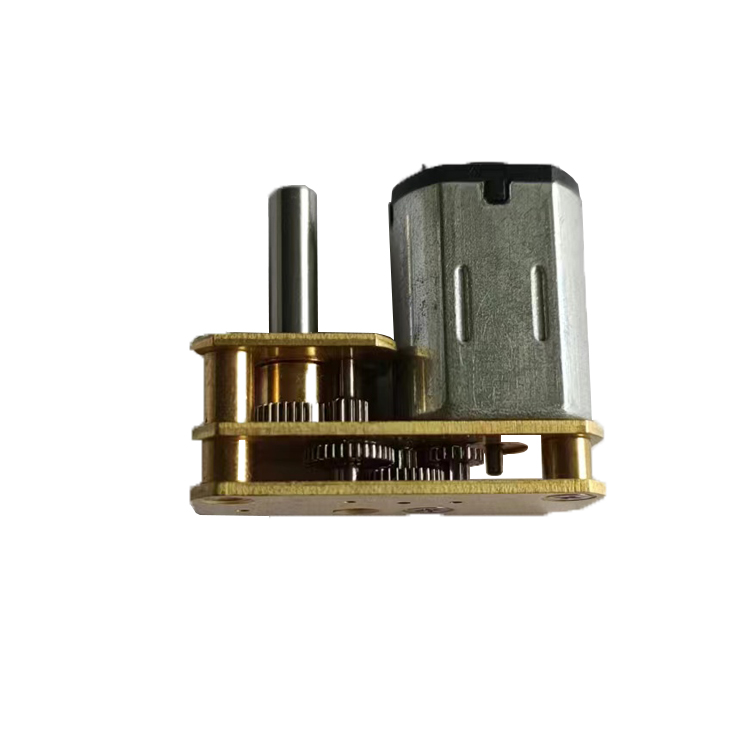
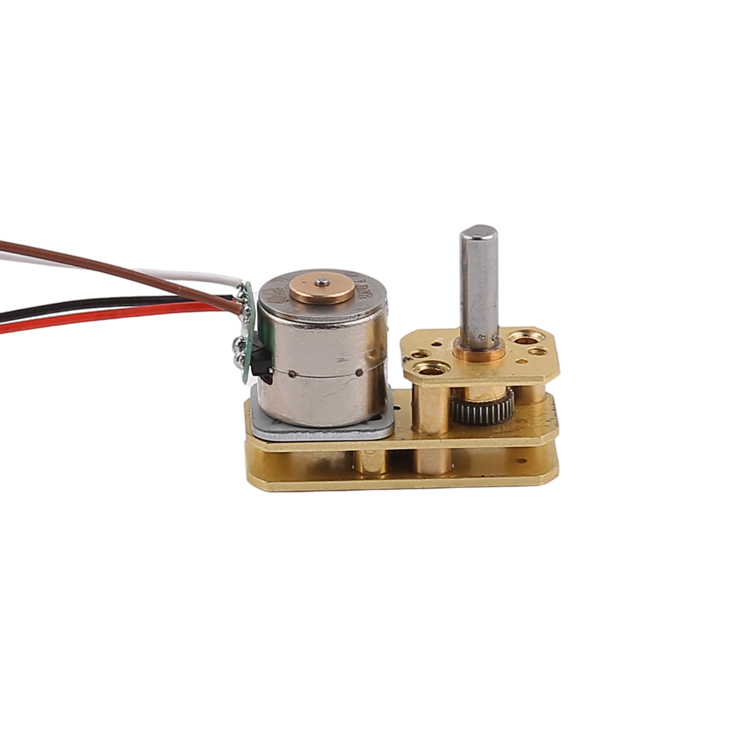
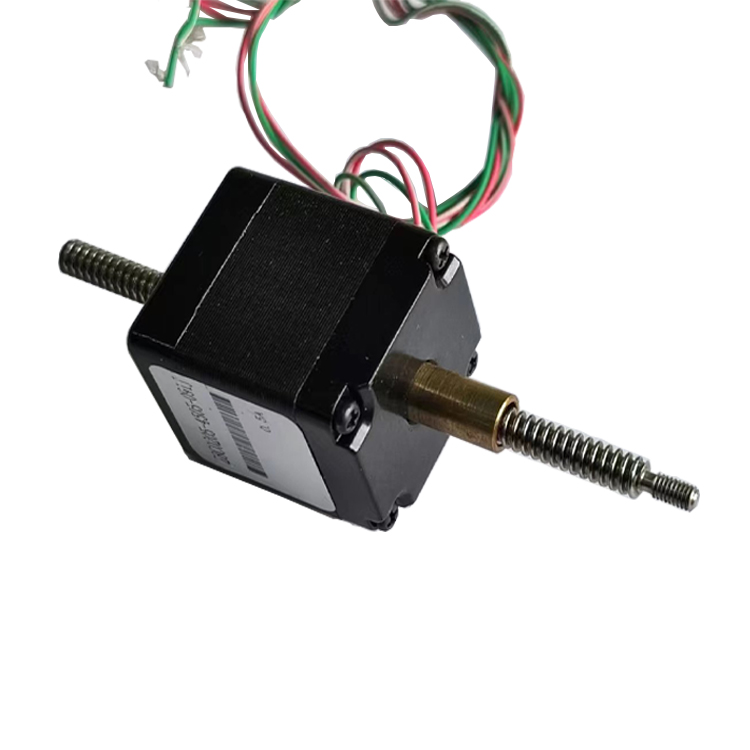
Motor DC cum rota vermiculata...
Descriptio Hic est motor capsae rotarum seriei JSX5300, motor DC penicillo instructus cum rotatione vermis. Axis eius egressus est axis D-formatus 10 mm diametro et longitudo axis aptari potest. Etiam capsam rotarum habet quae in designum dualis axis converti potest. Capsa rotarum vermis etiam cum motore graduali coniungi potest, ut clientes secundum necessitates suas eligere possint. Pro opere continuo Numquam onus plus quam 25kg.cm da. Pro motore stellato...
-

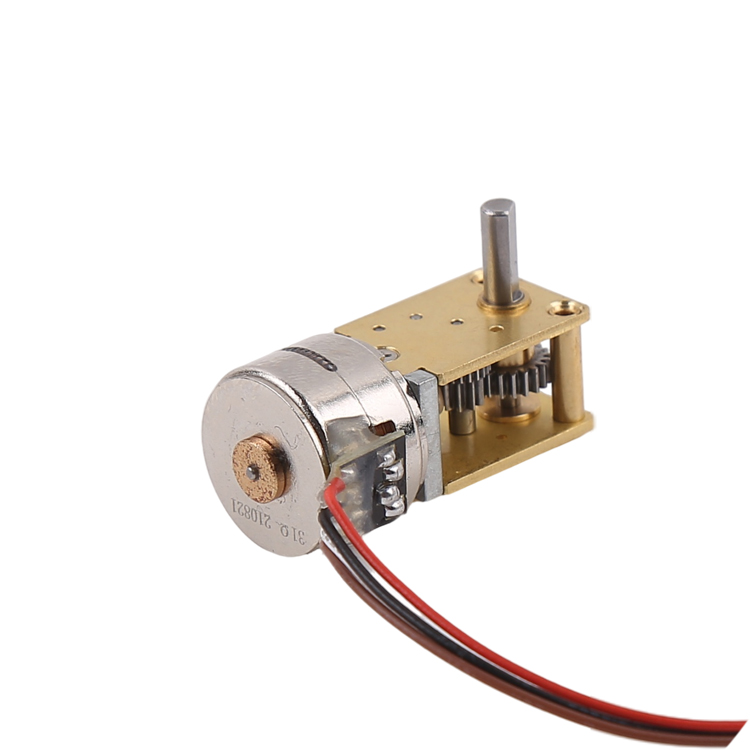
Motor rotarius DC celeritatis magnae...
Descriptio Hic est motor N20 DC cum capsa dentata 10*12. Motor N20 DC etiam est motor DC penicillo instructus et celeritatem sine onere circiter 15,000 RPM pro uno motore habet. Cum motor capsae dentatae connectus est, tardius curret et momentum torquens maior erit. Clientes rationem dentatae secundum necessitates suas eligere possunt. Rationes dentatae pro capsis dentatis praesto sunt: 2:1, 5:1, 10:1, 15:1, 20:1, 30:1, 36:1, 50:1, 63:1, 67:1, 89:1, 100:1,...










-

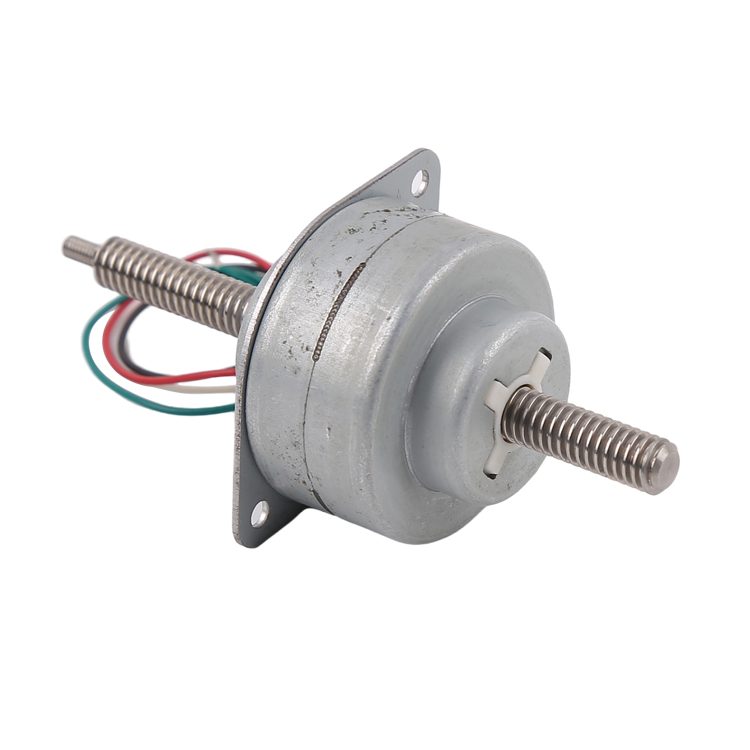
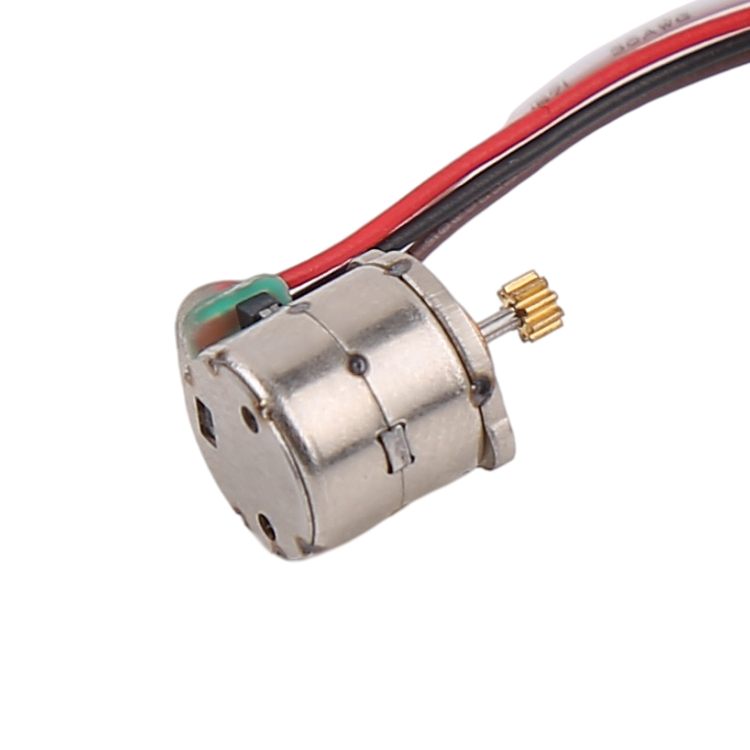
Micromotor gradualis 20 mm...
Descriptio Hic motor gradatim magneticus permanentis diametro 20mm habet, momentum torquens 60gf.cm habet, et celeritatem maximam 3000rpm attingere potest. Hic motor etiam capsae rotarum addi potest, angulus gradus motoris 18 graduum est, id est, 20 gradus per revolutionem. Cum capsa rotarum additur, resolutio anguli rotationis effectus retardationis motoris 0.05~6 gradus attingere potest. Multis necessitatibus applicabilis, accurata moderatio positionis rotationis. Coil r...
-

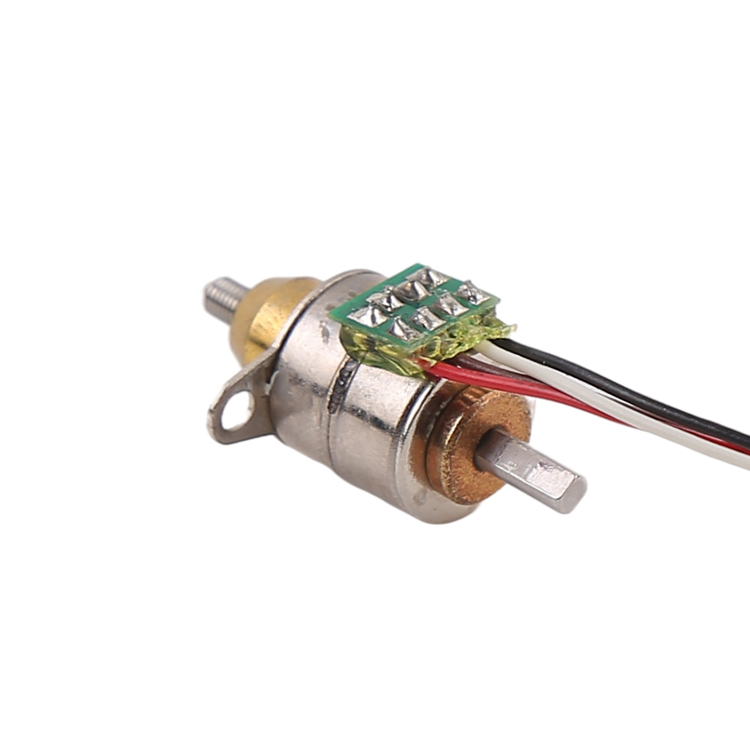
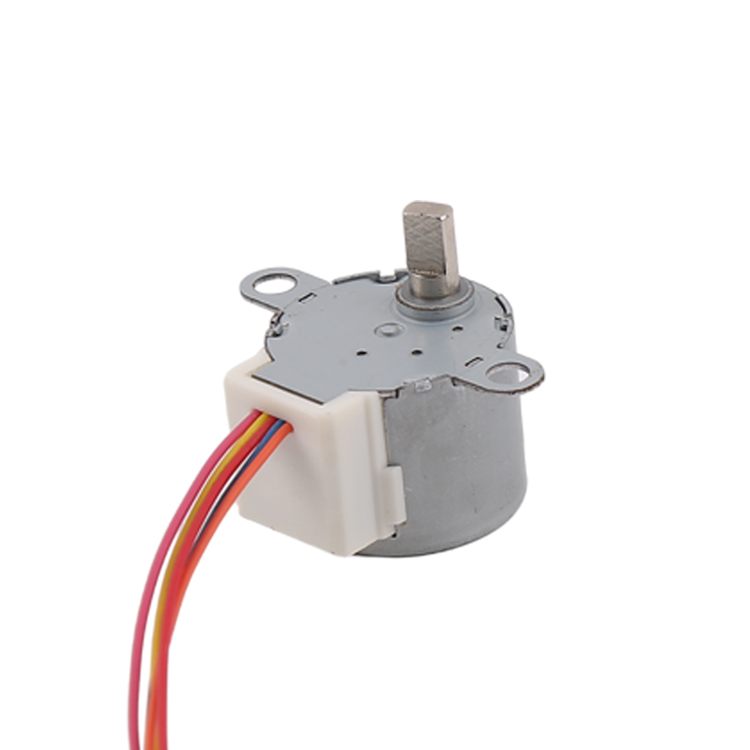
Magnetes permanens 20mm...
Descriptio 20BY45-53, diameter motoris est 20mm, altitudo motoris est 18.55mm, spatium foraminis auris est 25mm, et angulus gradus motoris est 18 graduum. Quaeque pars ex formis accuratis fabricata est. Ergo, comparatum cum similibus productis, hoc productum commoda habet rotationis stabilis, momenti positionis parvi et efficientiae magnae. Altitudo normalis axis egressus motoris est 9mm, et exitus motoris adaptari potest...
-

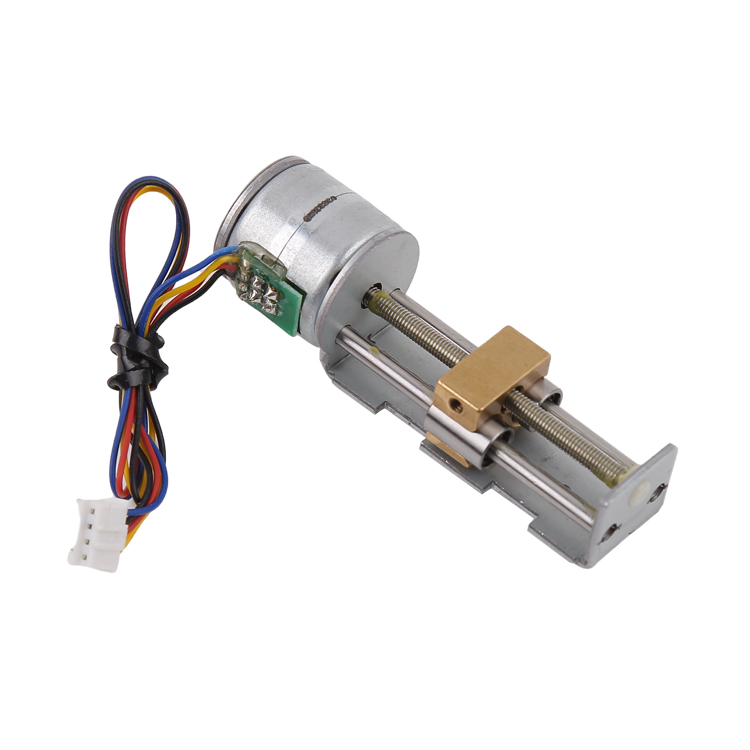
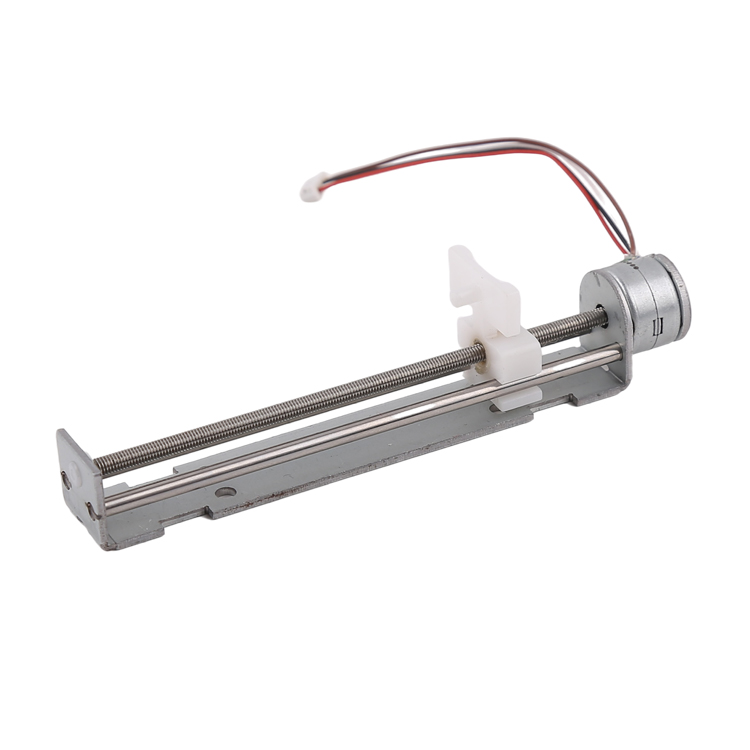
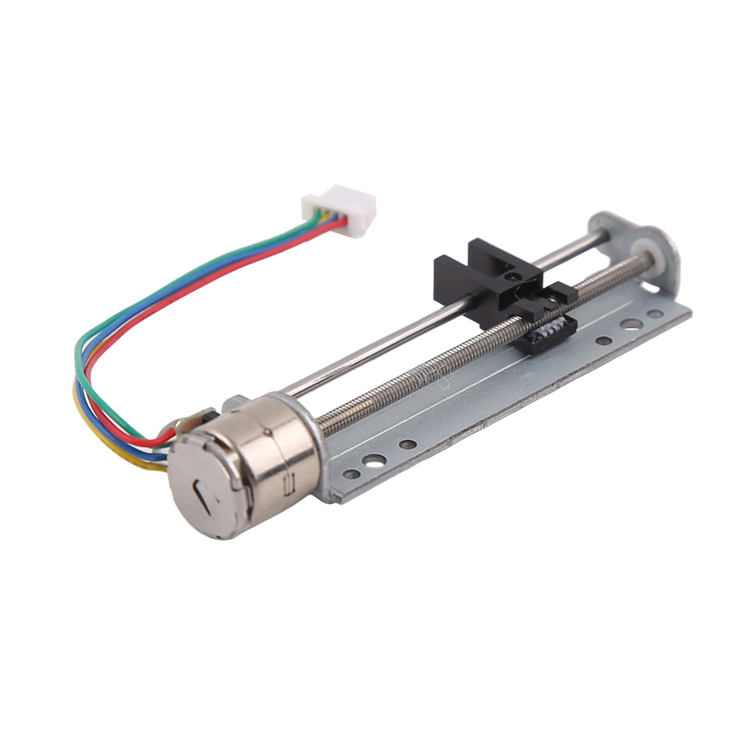
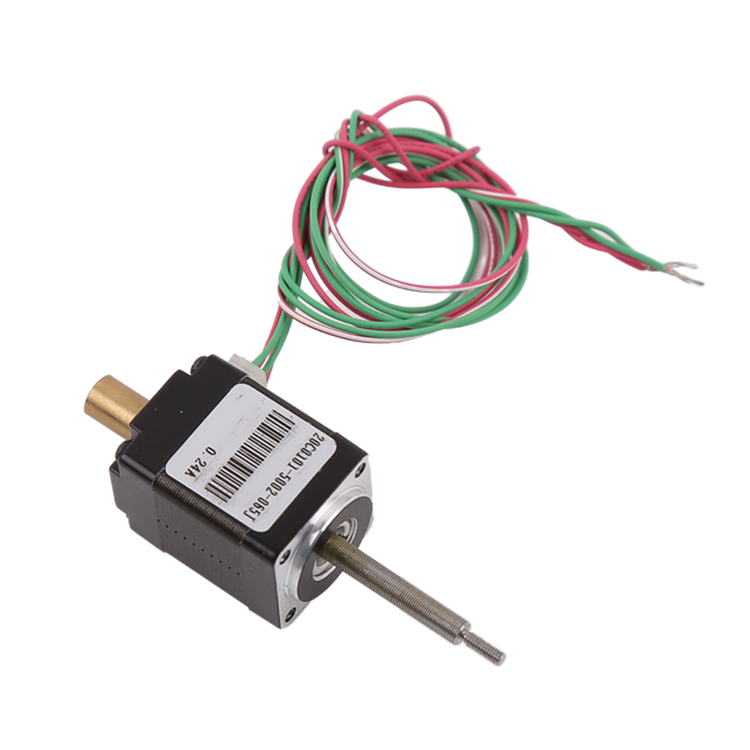
15 per micromotorem gradualem...
Descriptio VSM1519 est motor gradualis micro-gradualis praecisionis. Eius egressus cochleam M3 adhibet ad motum linearem perficiendum et impulsum generandum, qui directe ut actuator adhiberi potest ad actiones a clientibus requisitas consequendas. Angulus fundamentalis motoris gradualis est 18 gradus, et motor 20 gradus singulis hebdomadibus currit. Ergo, resolutio dislocationis 0.025mm attingere potest, ut...
-

10BY mini 5v 10mm diametro...
Descriptio VSM1070 est motor gradatim gradualis parvus, summae qualitatis, qui sonum parvum facit. Diameter motoris est 10mm, altitudo motoris est 10mm, spatium inter foramina auris motoris est 14mm, et altitudo axis egressus est 5.7mm. Altitudo axis egressi motoris secundum necessitates institutionis emptoris aptari potest. Axis egressus motoris conventionalis dentibus cupreis instructus est (modulo dentatum...).
-
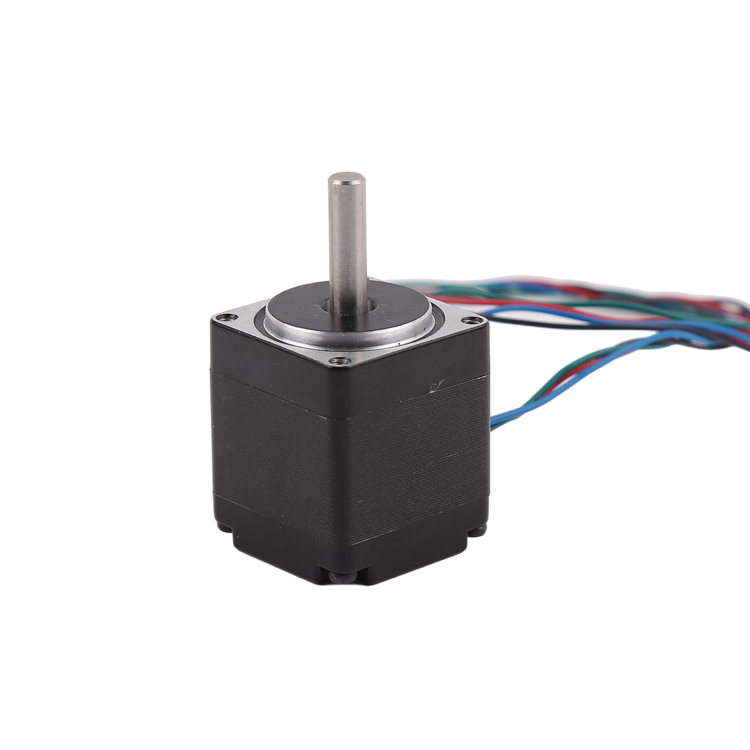
Mini Micro Stepper 8mm...
Descriptio Motor gradualis est motor qui signa electrica impulsuum in correspondentem dislocationem angularem vel dislocationem linearem convertit. Multas bobinas habent quae in greges, "phases" appellatos, ordinantur. Singulas phases ordine excitando, motor rotabit, uno gradu per vices. Gradu a gubernatore moderato, positionem et celeritatem valde accuratam consequi potes...
-

sonitus humilis, alta qualitas...
Descriptio VSM0613 est motor microgradualis. Diametros motoris est 6 mm, altitudo 7 mm, diametros axis emissarii 1 mm, et altitudo axis emissarii conventionalis 3.1 mm. Longitudo axis emissarii secundum necessitates institutionis emptoris aptari potest. Axis emissarius motoris instructus est dentatura conventionalis cum modulo 0.2, numero...
-

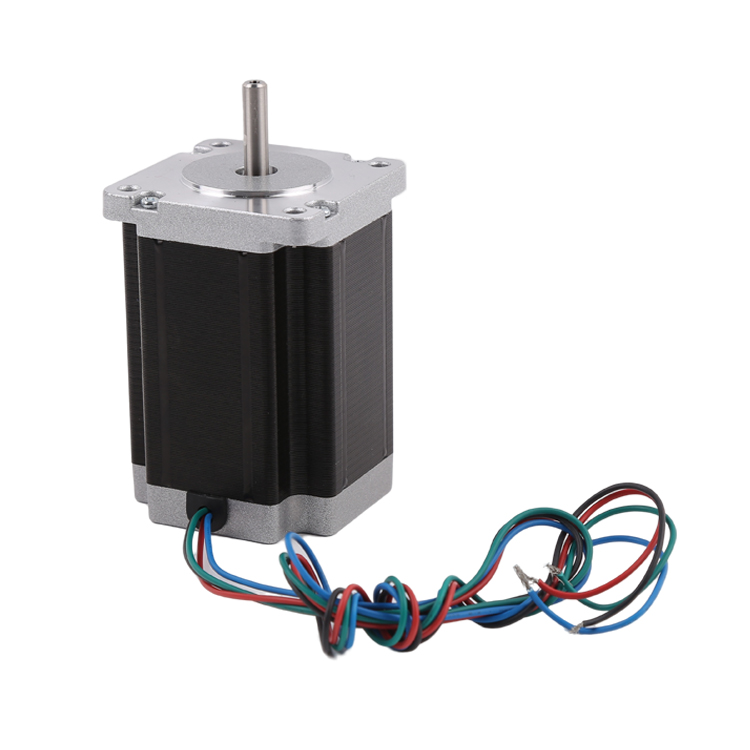
Micro torquens 35m...
Descriptio Duae rationes convolutionis motorum gradualium sunt: bipolaris et unipolaris. 1. Motores Bipolares Nostri motores bipolares plerumque tantum duas phases habent, phasim A et phasim B, et quaeque phasis duos fila exeuntia habet, quae separatae convolutiones sunt. Nulla conexio inter duas phases est. Motores bipolares quattuor fila exeuntia habent. 2. Motores Unipolares Nostri motores unipolares plerumque quattuor phases habent. Duabus phasibus motorum bipolarium innixi,...















DIARIUM INTERRETIALE
Nuntios communica et valorem in agro micromotorum affer.
-

Applicatio Motoris Micro-Gradarii in Endoscopio
Cum celeriter technologiae diagnosis et curationis minimaliter invasivae progressae sint, endoscopia instrumentum diagnosticum et curationis indispensabile in medicina moderna facta est. In processu endoscopiorum traditionalium ad intelligentiam, praecisionem et roboticam evolventium, motores microgradales ingentialiter...
-

Applicatio Motoris Micro-gradatorii in Pulveris Vacuum
Cum celeriter domorum intelligentium progressum, machinae roboticae ad purgandum domesticum hodiernum instrumentum commune factae sunt. Inter multas partes principales scoparum pavimenti, motores gradatim micrometrici partes magis magisque cruciales agunt propter commoda moderationis accuratae, emissionis humilis...
-

Munus Motorum Micro-Gradariorum in Technologia Micro-Robotica
Dum technologia microroboticae progreditur, praecisio, compactio, et facultas gubernandi praecipua industriae requisita facta sunt. Inter partes essentiales, motor microgradualis, propter magnam accurationem, gubernationem..., elementum criticum in designio microroboticae emersit.