Cum celeriter domorum intelligentium progressu, machinae roboticae ad purgandum pulverem capiendum instrumentum commune ad purgationem domesticam hodiernam factae sunt. Inter multas partes principales scoparum pavimenti, motores micrograduales partes magis magisque cruciales agunt propter commoda gubernationis accuratae, sonitus humilis, et longae vitae. Hic articulus in usus specificos, commoda technica, et puncta delectus motorum microgradualium in scopis pavimenti profundius tractabit.

Quid est motor gradualis minutus?
Micromotor gradatim est actuator qui signa electrica impulsuum in motum angularem vel linearem convertit. Dissimilis motoribus DC ordinariis, rotorem angulo fixo (angulum gradatim appellatum) rotat quotiescumque signum impulsuum accipit. Haec proprietas "imperii circuitus aperti" permittit micromotoribus gradatim positionem accuratam sine necessitate encoderum consequi, eos praecipue aptos reddit machinis callidis ut purgatores pavimenti quae sensibiles sunt ad volumen et pretium.
Quattuor applicationes principales motorum microgradualium in scopis pavimenti

1. Nucleus impulsivus systematis navigationis Radar Laser (LDS)
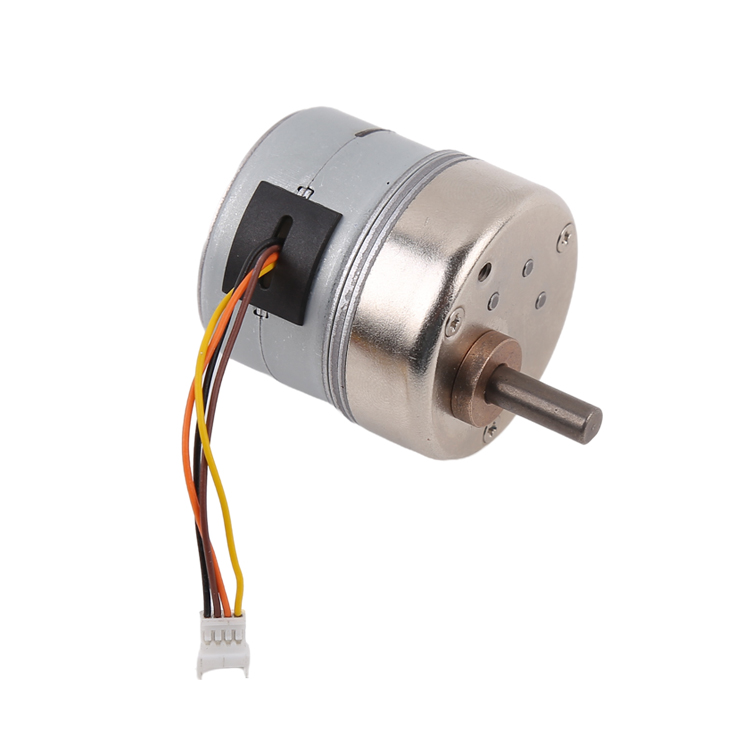
Hodie, machinae scopariae vulgares, mediocriter et pretiose praeditae, omnes technologiam navigationis radar lasericae utuntur. Moduli LDS rotationem celerrimam (plerumque 300-600 rpm) requirunt ad ambitum circumstantem perscrutandum, dum etiam requisita stabilitatis celeritatis altissima habent. Motores microgradales electio idealis sunt pro impulsoribus LDS propter sequentes proprietates:
Imperium celeritatis accuratum:Frequentiam pulsus adaptando, celeritas accurate regi potest ut uniformitas acquisitionis notitiarum nubis punctorum confirmetur.
Proprietates vibrationis humilis:Motoribus penicillis comparatis, motores gradatim moventes lenius currunt, impedimenta cum modulis lasericis minuentes.
Longa vita:Sine detrimento penicilli electrici designata, vita totius machinae ad milia horarum pervenire potest.
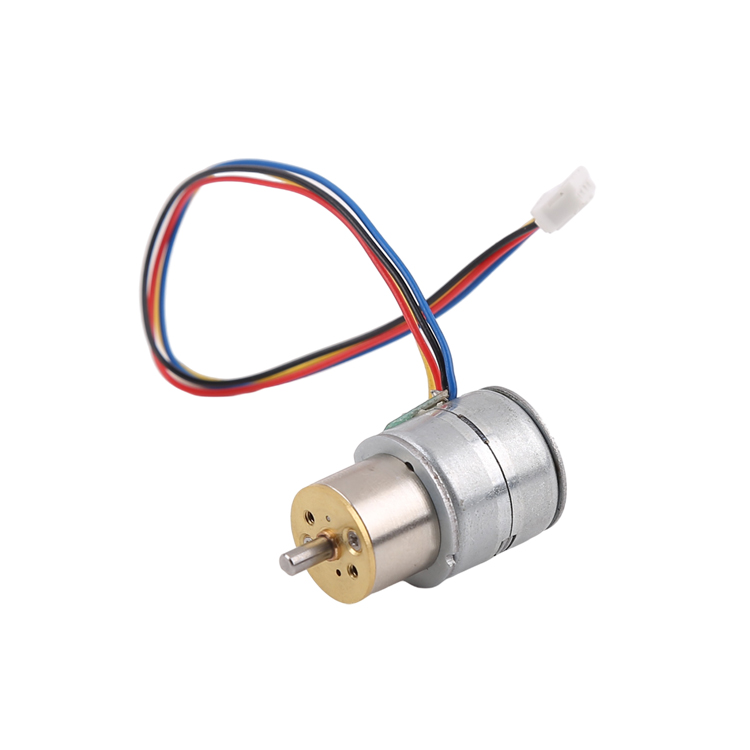
In applicationibus practicis, moduli LDS saepe motores microgradales magnetis permanentis diametro 25mm, cum algorithmis impulsionis circuitus clausi coniunctos, utuntur ad gradus strepitus humiles (plerumque infra 40dB) conservandos durante rotatione celerrima.
2. Elevatio et celeritas peniculi lateralis machinae scopae adaptandae
Scopa marginis inferioris machinae scopae sordes in angulis parietum et marginibus supellectilis in spatium scoparum principalem verrere curat. Formae traditionales motores DC ordinarios ad rotationem scopae marginis impellendam utuntur, sed altitudinem scopae marginis moderari non possunt. Post introductionem motorum microgradualium, haec assequi licet:
Elevatio adaptativa: Cum machina scopae tapetia vel limina detegit, motor gradatim accurate penicillum marginale moderatur ut 5-8mm elevet, implicationem vitans.
Adaptatio multi-velocitatis:Automatice inter celeritates 200-400 rpm pro variis materiis pavimenti, ut pavimentum ligneum, tegulas, tapetes, etc., commutat.
Protectio contra inversionem resistentiae:Detecto statu aberrante motoris gradualis, inversio intelligens efficitur cum penicillum marginale resistentiam offendit.
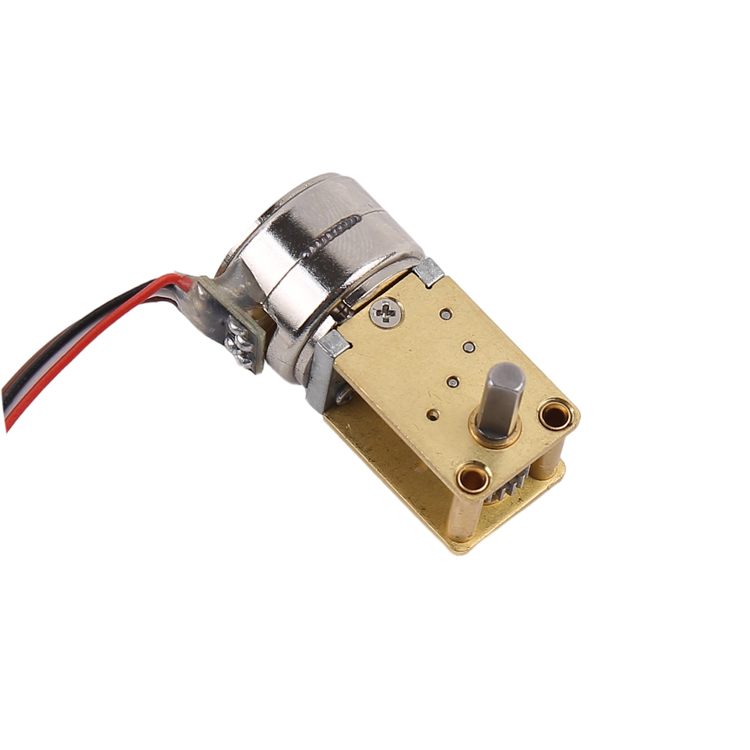
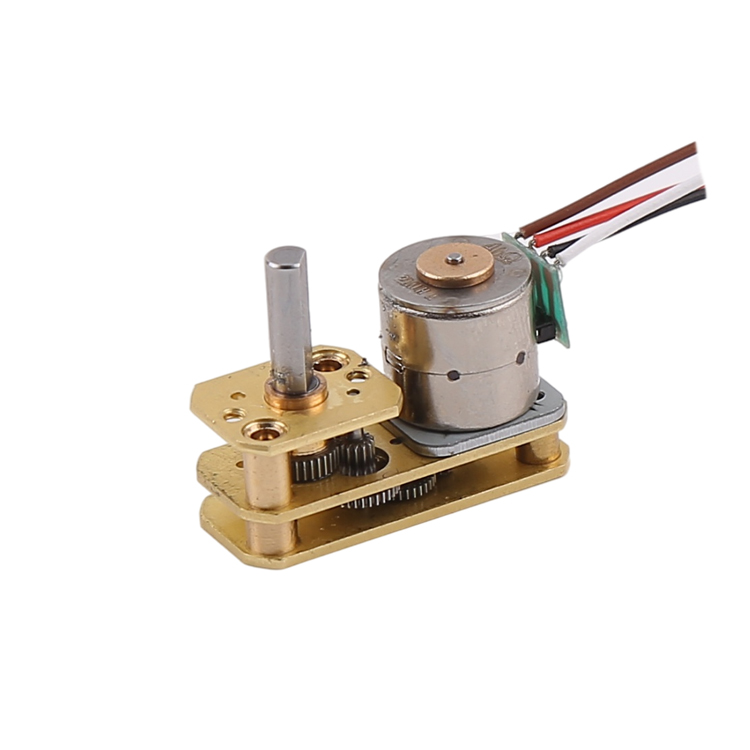
Haec applicatio plerumque utitur parvo motore graduali, cum mechanismo cochleari coniuncto ad motum linearem efficiendum.
3. Praecisa gubernatio amortitoris ventilatoris
Vis suctionis machinae scopae non solum a celeritate ventilatoris pendet, sed etiam arcte cum statu aperiendi et claudendi ductus aeris coniungitur. Nonnulla exempla pretiosa motores graduales micrometricos ad deflectorem portae aeris regendum utuntur:
Suctio sine gradibus adaptabilis:A suctione debili in modo silenti ad suctionem fortem in modo potenti, lineariter adaptabilis
Obsignatio arcae pulveris:Cum clauditur, motor gradatim deflectorem agit ut ductum aeris omnino claudat, prohibens ne pulvis refluat.
Optimizatio conservationis energiae:Accurate aperturam ianuae aeris modera ut onus ventilatoris minuatur cum magna suctio non requiritur.
In hoc casu applicationis, facultas motorum microgradualium ad momentum electricum conservandum maxime magni momenti est, cum positionem deflectoris etiam si energia electrica interruptio accidat conservare possint.
4. Modulus elevationis et vibrationis trahendi
Recentibus annis, motores micrograduales etiam partes magnas egerunt in popularibus machinis omnia-in-uno perscrutantibus et tergendis.
Mechanismus elevationis peniculi:Cum tapete agnoscitur, motor gradatim fulcrum peniculi 10-12mm attollitur ne tapete madefiat.
Imitatio vibrationis tergendi manus:Celeriter inter rotationem anteriorem et posteriorem motoris gradualis commutando, peniculus vibrationem horizontalem reciprocantem consequi potest, effectum purgationis macularum pertinacium emendans.
Adaptatio pressionis deorsum:Accurate pressionem peniculi in terra secundum varia materia soli moderare (plerumque intra ambitum 5-15N)
Commoda motorum microgradalium comparata cum aliis motoribus
Proiectum comparationis: motor gradatim brevis, motor DC penicillo impulsus, motor DC sine penicillo impulsus
Alta accuratio positionis (circuitus aperti) encoder requirit.
Complexitatis moderatio est simplex, directa, et complexa
Excellens momentum torquens ad celeritatem lentem, plerumque pauper
Gradus sonitus humilis, medius, altus, et humilis
Pretium medium, humile, altum
Longa, brevis, longa vita
| Proiectum comparationis: | Motor gradualis micro | Motor DC penicillo instructus | Motor DC sine spazzolis |
| accuratio positionis | Alta (circuitus aperti)
| Codificator requiritur
| Codificator requiritur
|
| Complexitas moderationis | simplex
| simplex
| complexus |
| Momentum torquens lentae celeritatis | praeclarus
| generalis | pauper
|
| sonitus gradus | humilis | media superior
| humilis |
| sumptus | moderatus | humilis | altus |
| vita | longus | brevis | longus |
Pro scopis pavimenti, motores microgradales praecisam positionis moderationem praebent sine necessitate feedback circuli clausi, quod commodum irreparabile in navigatione LDS et mechanismis elevationis habet.
Puncta clavis ad motores micrograduales eligendos pro scopis pavimenti

Cum machinae scopariae fabricantur, in delectu motorum microgradualium his parametris attendendum est:
Dimensiones externae:Communiter 20mm, 25mm, 28mm quadrata, spatio interno producti congruere debent.
Momentum torquendi conserva:Applicationes LDS 0.1N·m vel plus requirunt, et mechanismi elevationis 0.2-0.3N·m requirunt.
Currens aestimatus:plerumque 0.5-1.0A, habita ratione facultatis microplagulae impulsivae
Angulus gradus:1.8° aptum est ad LDS, 0.9° aptum est ad mechanismos elevationis qui accuratiorem gubernationem requirunt.
Temperatura operandi:Temperatura interna machinae scopae ad 60°C pervenire potest, et motor cum resistentia temperaturae ≥ 100°C eligendus est.
Quaestiones frequentes
Q: Facile est motoribus microgradialibus gradum in scopis pavimenti amittere?
A: Dummodo momentum torquens oneris non excedat 70% momenti torquentis retinendi et curva accelerationis et retardationis idonea constituta sit, amissio gradus rarissima est. Modela pretiosa impulsionem graduum clausam ad positionem rotoris in tempore reali monitorandam utentur.
Q: Num motor microgradalis electricitatem consumit?
A: Comparati cum ventilabris et motoribus penicillorum principalium, motores gradatim consumptionem energiae minimam habent (plerumque 1-3W). Attamen notandum est motorem gradatim adhuc currentem consumere dum positionem retinet, et designatio statum oneris diu retinere vitare debet.
Q: Quomodo strepitum motorum gradualium minuere possum?
A: Technologia segmentata agendi adoptanda, curvas accelerationis et retardationis optimizandas, et additae laminae gummi ictus absorbentes involucro motoris sonitum operationis efficaciter minuere possunt.
Proclivitates Progressionis Futurae
Cum evolutione purgatorum vacuorum versus directiones callidiores, silentiosiores et tenuiores, technologia motorum microgradualium etiam perpetuo evolvitur:
Impulsor integratus:Integra fragmentum impulsoris cum motore in involucro singulari ut vestigium PCB minuatur.
Technologia silens:Novam formam circuitus magnetici et materias flexibiles dentatarum adhibitae sunt ad sonitum operandi ulterius reducendum.
Motor tenuissimus:Altitudo intra 12mm comprimi potest, apta ad designationem machinae scopariae tenuissimae
Conclusio
Quamvis parvus, motor microgradalis pars clavis est ad navigationem accuratam, vitanda impedimenta perspicaciter, et purgationem adaptivam in scopis pavimenti efficiendam. Ingeniariis investigationis et progressionis purgatorum vacuorum, profunda comprehensio proprietatum operandi et methodorum selectionis motorum microgradalium adiuvare potest ad designanda producta cum meliore effectu et maiori fidelitate. Cum popularizatione robotarum domesticarum, scenaria applicationis motorum microgradalium ulterius expandentur, fundamentum imperii motus pro suggestis mobilibus intelligentibus fiant.
Si machinam scopariam evolvis, libenter consule peritum venditorem motorum gradualium de solutionibus ad condiciones laboris specificas aptatis.
Tempus publicationis: XX Aprilis MMXXVI